 PoBot
PoBot
Etudiant à l’EIGSI, école d’ingénieurs généraliste, j’ai choisi pour projet de première année l’élaboration d’un montage ludique permettant de montrer simplement le fonctionnement d’un asservissement. Je reprends dans cet article toutes les étapes qui m’ont permis d’y arriver.
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Asservissement d’un moteur à courant continu
Asservissement d’un moteur à courant continu
8 octobre 2014, par Benoit T. -
 Construire une voiture télécommandée
Construire une voiture télécommandée
28 novembre 2015, par Pierre M.Une Arduino pilote une voiture télécommandée
-
 Une interface IHM pour Arduino
Une interface IHM pour Arduino
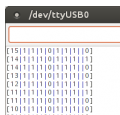
18 septembre 2011, par LoïcLoïc a développé une interface utilisateur très simple mais complète pour les cartes Arduino. Il a développé son propre protocole sur quatre octets seulement, permettant une plus grande vitesse que Firmata. Des fonctionnalités étendues (enregistrement, stockage, chargement de fichiers) font de cette IHM une des meilleures qu’on puisse trouver. Cet avis n’engage que moi (Julien) mais je laisse le soin à Loïc de vous présenter son travail afin de vous en convaincre :
Comment introduire le (…) -
 LCD sur I2C simplement
LCD sur I2C simplement
25 septembre 2011, par Julien H.Le prix des afficheurs à cristaux liquides est en baisse, et il est de plus en plus fréquent de trouver des circuits de commande simples, évitant la gestion du protocole et économisant surtout le nombre de pattes d’entrée/sortie nécessaires. Georges utilise pour son projet un LCD sur bus I2C à base de PCF8574 dont voici la mise en œuvre.
Il y autant de circuits de communication avec un écran LCD que de contrôleurs de LCD. Deux possibilités de se retrouver bloquer par un manque de (…) -
 iRobot Roomba : capteur infra-rouge
iRobot Roomba : capteur infra-rouge
16 mars 2011, par Frédéric BernatJ’utilise des robots aspirateurs Roomba de la société iRobot depuis plusieurs années. A force de me rendre l’inestimable service de ne pas avoir à passer l’aspirateur (et donc de ne plus me faire engueuler quand j’avais le malheur d’oublier…) il a fallu procéder à quelques réparations. Dernière réparation en date, le changement du pare-choc. Il était tellement rayé que les capteurs infra-rouge de proximité ne voyaient plus les obstacles…
Refusant de jeter quoi que ce soit sans en avoir (…) -
 Moteur pas-à-pas piloté par un shield L293
Moteur pas-à-pas piloté par un shield L293
27 décembre 2012, par Julien H.Les contrôleurs de moteur pas-à-pas comme le L293 reproduisent avec une tension d’alimentation spécifique (plus élevée, avec un courant disponible plus important) les consignes transmises depuis un contrôleur avec une tension plus faible (3.3 volts ou 5 volts et surtout un courant faible).
La difficulté présentée ici provient de l’électronique ajoutée dans la conception des cartes d’extension qui facilitent la connexion. Pour éviter d’avoir à gérer 6 signaux (deux "Enable" qui activent ou (…) -
 Soucoupe contrôlée à distance
Soucoupe contrôlée à distance
26 septembre 2012, par Julien H.Notre plate-forme flottante est opérationnelle depuis plusieurs mois, et les tests de flottaison sont concluants.
Les circuits ne sont pas encore fixés dans la sculpture unique qui couvrira l’ensemble, d’où l’allure globale du montage :
Avant de procéder à l’asservissement automatique, voici un programme permettant de la contrôler à distance, de recevoir les valeurs internes de différentes variables et surtout... de ramener la soucoupe à bon port quand elle se retrouvera en plein milieu (…) -
 Position par souris optique
Position par souris optique
6 septembre 2009, par Julien H.Utiliser une souris optique est une idée répandue. En effet, on peut espérer une grande précision (400 points par pouce soit une précision théorique de 0,0635 mm entre deux valeurs). Mais elle est aussi souvent vite abandonnée car on commence par essayer avec la souris posée devant soi, on fait 2-3 aller/retour à la même position et on constate à l’écran une sacrée différence qui fait renoncer.
Ce phénomène s’explique par l’utilisation de la vitesse de mouvement dans le driver de souris de (…) -
 BaBa, un robot piloté par Bluetooth (2011)
BaBa, un robot piloté par Bluetooth (2011)
15 juillet 2012, par Grégory Fromain, Julien H.Ce robot est l’oeuvre de Greg, un adhérent de l’association qui nous a rejoint en 2011.
Baba signifie Bot Arduino Bluetooth Android.
Le robot intègre de nombreux kits : Arduino, plate-forme 4WD, échanges Bluetooth, capteurs ultra-son, tourelle pan-tilt... ce qui en fait une plate-forme d’étude très pratique.
Il a été présenté lors de nos ateliers, puis a servi à une démonstration de mathématiques lors de la présentation MathC2+ de l’INRIA.
Le code source du projet est mis à jour (…) -
 CMPS03 : une boussole I2C simple
CMPS03 : une boussole I2C simple
22 décembre 2011, par Julien H.La carte CMPS03 de Devantech est une boussole électronique : deux capteurs Philips KMZ51 orientés à 90° l’un de l’autre mesurent une résistance variant selon le champ magnétique terrestre, et un micro-contrôleur PIC 18F transmet les informations selon le mode souhaité (PWM ou I2C).
C’est la plus ancienne des boussoles électroniques dans le monde amateur (première utilisation au club en 2002) et depuis des solutions plus robustes (correction d’inclinaison sont apparues) ou moins chères (…)
