 PoBot
PoBot
Les contrôleurs de moteur pas-à-pas comme le L293 reproduisent avec une tension d’alimentation spécifique (plus élevée, avec un courant disponible plus important) les consignes transmises depuis un contrôleur avec une tension plus faible (3.3 volts ou 5 volts et surtout un courant faible).
La difficulté présentée ici provient de l’électronique ajoutée dans la conception des cartes d’extension qui facilitent la connexion. Pour éviter d’avoir à gérer 6 signaux (deux "Enable" qui activent ou (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Moteur pas-à-pas piloté par un shield L293
Moteur pas-à-pas piloté par un shield L293
27 décembre 2012, par Julien H. -
 Echanges maître/esclaves en I2C
Echanges maître/esclaves en I2C
17 mars 2011, par Julien H.Voici un article qui décrit dans plusieurs langages les échanges qu’il faut mettre en œuvre entre deux dispositifs équivalents (deux micro-contrôleurs par exemple) pour une liaison I2C.
Il ne s’agit pas de piloter un périphérique I2C mais de programmer à la fois le maitre et l’esclave, afin d’expliquer les différentes étapes. Pour compléter cet exercice, on utilisera plusieurs langages et si possible plusieurs cibles.
Les principes
Pour établir une communication sur un bus I2C, il faut (…) -
 Contrôle de ruban de leds par Arduino
Contrôle de ruban de leds par Arduino
20 mai 2013, par Audrick F.Retour d’expérience de controle de ruban ledstrip sur le Drikybot
-
 Position par souris optique
Position par souris optique
6 septembre 2009, par Julien H.Utiliser une souris optique est une idée répandue. En effet, on peut espérer une grande précision (400 points par pouce soit une précision théorique de 0,0635 mm entre deux valeurs). Mais elle est aussi souvent vite abandonnée car on commence par essayer avec la souris posée devant soi, on fait 2-3 aller/retour à la même position et on constate à l’écran une sacrée différence qui fait renoncer.
Ce phénomène s’explique par l’utilisation de la vitesse de mouvement dans le driver de souris de (…) -
 Arduino en ligne de commande
Arduino en ligne de commande
3 décembre 2012, par Julien H.Il existe plusieurs cas où l’on a besoin de programmer une carte compatible Arduino sans passer par l’environnement : lorsqu’on a plusieurs programmes et qu’on veut passer de l’un à l’autre rapidement lorsque la carte Arduino est attachée à un PC sans écran
Nous sommes dans les deux cas avec notre robot Nono : lors du développement, on a besoin d’envoyer rapidement un programme d’arrêt des moteurs, et avec la nouvelle évolution, une carte Raspberry Pi est connectée à l’Arduino par l’USB et (…) -
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
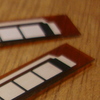
13 janvier 2011, par Julien H.Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…) -
 Visualisation radar d’une détection de distance
Visualisation radar d’une détection de distance
15 septembre 2008, par Julien H.Le radar suivant est réalisé avec Processing. ll reprend le principe de l’oscilloscope minimal : notre capteur (carte électronique) envoie la valeur lue par liaison série jusqu’à l’ordinateur qui transforme la valeur pour la représenter dans un radar (demi-cercle).
On pourra ainsi représenter la détection de l’environnement ambiant avec un capteur de distance Sharp ou ultrason sur un servomoteur en rotation permanente.
Le résultat
This browser does not have a Java Plug-in. (…) -
Arduino pilotée en Python
16 août 2014, par Julien H.Cet article nous a été inspiré par Vincent L. (alias @InfluencePC) qui l’a mis en œuvre sur son robot avec une Raspberry Pi et la bibliothèque Nanpy. Bravo et merci à lui !
Lorsqu’il s’agit de faire fonctionner une carte Arduino avec un programme autonome sur ordinateur, il y a deux écoles : développer un programme spécifique sur Arduino qui gère la communication pour traiter chaque commande de l’ordinateur, ou bien installer un code générique qui gère la communication. Par "ordinateur", (…) -
 Interruptions externes
Interruptions externes
23 novembre 2009, par Julien H.Nous allons voir dans cet article l’exploitation d’entrées numériques particulières d’un micro-contrôleur, appelées "interruptions externes".
Cet article va utiliser l’Arduino donc c’est une utilisation simplifiée. Un autre article de ce site est dédié aux microcontrôleurs par une approche plus bas-niveau : Trucs et astuces.
Définition
Il s’agit d’une connexion particulière dans le micro-contrôleur qui va interrompre l’exécution de votre code principal lorsqu’un changement est détecté (…) -
 Traitement du son par FFT (fast fourier transformer)
Traitement du son par FFT (fast fourier transformer)
20 mai 2013, par Audrick F.retour d’expérience de la FFT pour le robot DrikyBot
