 PoBot
PoBot
 Robots parallèles
Robots parallèlesPeu utilisés en robotique ludique, les robots parallèles gagnent à être connus car leur réalisation mécanique, certes complexe, est passionnante.
Mise à jour - octobre 2012 : c’est chose faite pour Pobot qui a son premier robot parallèle !
Les nouveaux procédés de construction (Lego, CNC, imprimantes 3D) permettent de réaliser en amateur des robots parallèles jusque-là réservés à la recherche et à l’industrie.
Un robot parallèle contient plusieurs activateurs mécaniques agissant ensemble (en... parallèle) pour mettre en mouvement la même pièce. Ils sont donc tous reliés, généralement d’une base fixe à une pièce mobile.
Hexapode
Voici un exemple de robot parallèle sous forme d’une plateforme à 6 degrés de liberté : grâce aux six vérins, l’hexagone supérieur peut se lever et se baisser (axe z), se déplacer d’avant en arrière (axe x) ou de gauche à droite (axe y), mais également pivoter sur lui-même (angle de lacet), se pencher en avant/arrière (angle de tangage) et se pencher sur les côtés (angle de roulis).
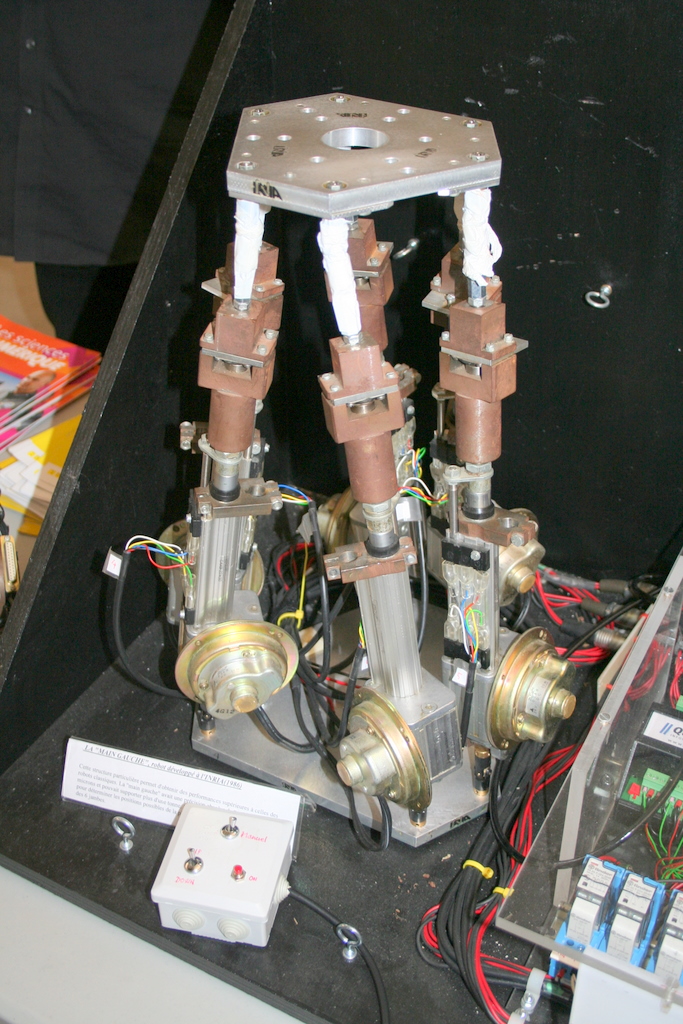
Ce type de robot est utilisé dans les simulateurs de vol grâce à la grande liberté de mouvement. La maquette visible ici a été réalisée par l’INRIA, centre de recherches en informatique et automatique à Sophia-Antipolis.
Le robot s’appelle "Left Hand", il a été construit en 1987, pèse 35 kg et est capable de mouvoir une charge de 600 kg avec une précision de 10 microns (millionièmes de mètre ou mille fois plus petit qu’un millimètre).
Chacun des vérins a un déplacement linéaire, et est fixé à la base fixe et à la plateforme mobile par des rotules libres : il n’y a pas d’autres moteurs et c’est l’interaction synchronisée des 6 vérins qui produit le mouvement souhaité : un système informatisé compose les valeurs des 6 mouvements souhaités pour calculer les vitesses de chaque vérin et leur donner la position nécessaire.
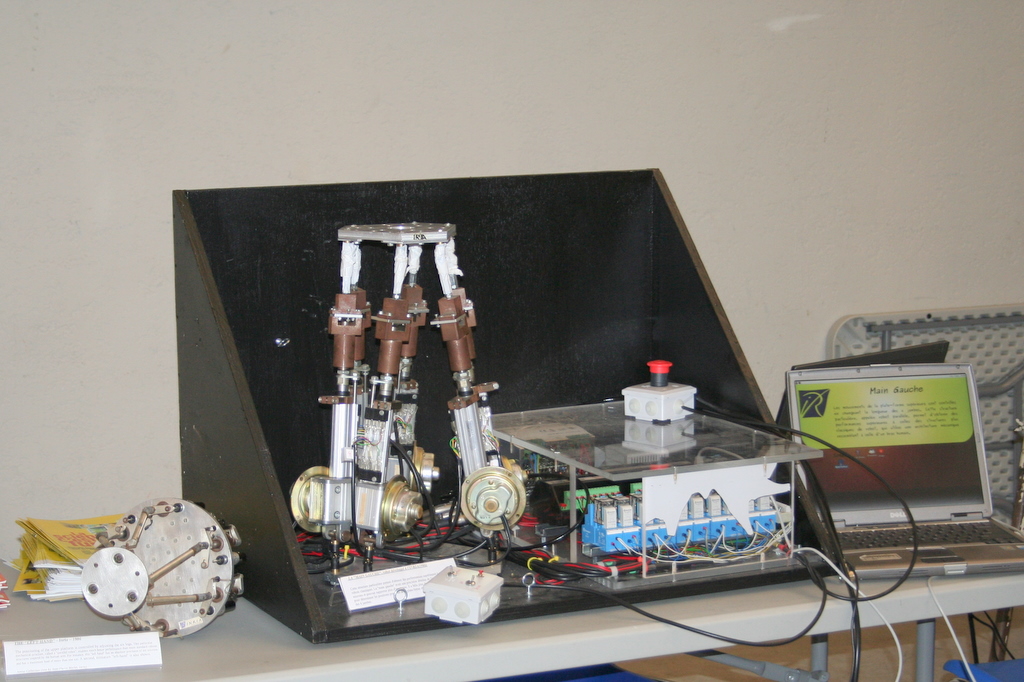
L’électronique de commande est transportable et l’ensemble se pilote avec un simple ordinateur : cette démo a été présentée par Thierry lors des Rencontres Sciences et Techniques à Antibes en avril 2011.
Si vous souhaitez obtenir une présentation, contactez-nous pour obtenir les dates des prochaines manifestations publiques, ou pour en organiser une.
Robot delta
Certains robots parallèles sont appelés "delta" à cause de la forme triangulaire de leurs longs membres. Ils sont utilisés dans l’industrie et la recherche médicale pour des activités de "pick & place" à haute vitesse, pour récupérer des composants et les placer au bon endroit.
Les robots delta commencent à séduire les modélistes par la haute technicité nécessaires. Certains ont même réussi à en construire en Lego Mindstorms.





Vos commentaires
# Le 28 avril 2011 à 15:49, par Marc En réponse à : Robots parallèles
En réponse à : Robots parallèles
Le Left Hand, à sa conception était-il destiné à servir les simulateurs d’avion ou était-il conçu pour servir à autre chose ? roomba
# Le 12 mai 2011 à 19:06, par Julien H. En réponse à : Robots parallèles
En réponse à : Robots parallèles
Bonjour Marc,
Je ne pense pas, vu sa taille. Par contre le principe est bien le même.
Répondre à ce message