 PoBot
PoBot
 YALW (2008)
YALW (2008)Ben oui, je m’y suis mis aussi.
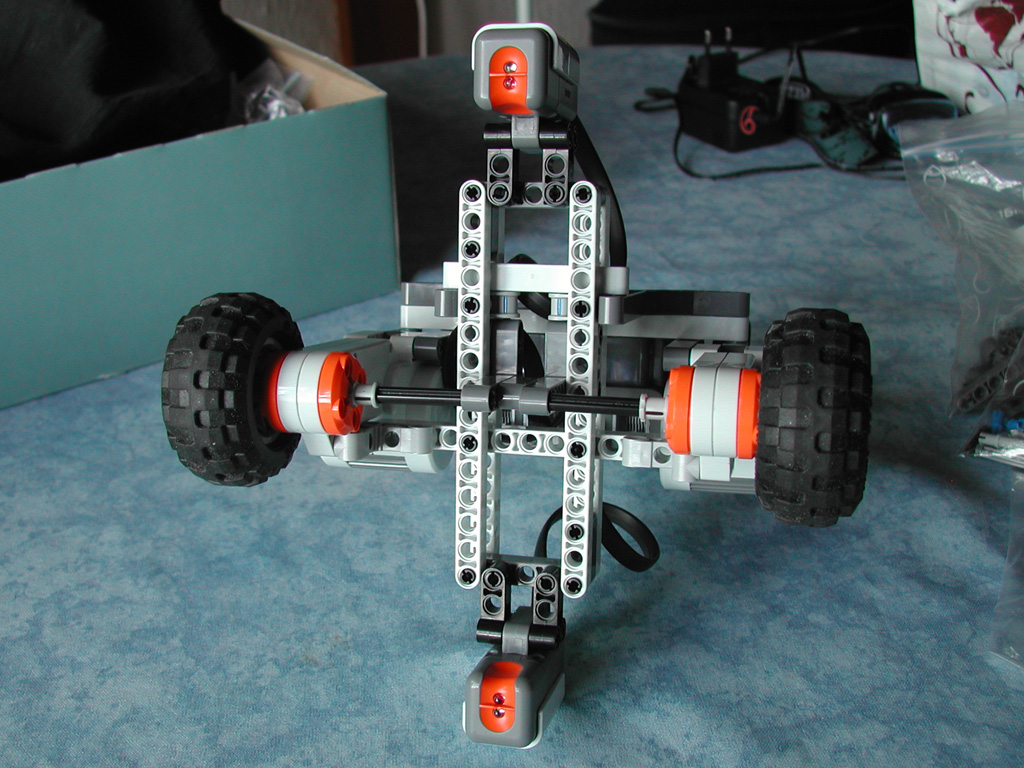
En fait c’était pour tester RobotC en vraie grandeur. Je suis reparti du robot fait par nos jeunes recrues du CIV, dans le cadre du TIPE, en le dotant d’un deuxième capteur de lumière pour voir si ça pouvait améliorer les choses.
L’autre extension est la possibilité de modifier les paramètres de l’asservissement directement sur le NXT, sans devoir recompiler et recharger le programme. Une excursion dans le domaines des IHM sur NXt en quelque sorte.
Le résultat est encourageant, mais comme initialement constaté, la solution à base de capteurs lumineux est très dépendante de l’ambiance lumineuse, et aussi de la couleur et de la réflectivité du sol.
Ci-après une vidéo de démo :
Et quelques photos également :
le robot :

Vue de face
| 
Vue de côté
|

Vue de dos
| 
Vue de dessous
|
l’interface utilisateur :
Menu principal : accès aux paramétrage PID
| 
PID : sélection du paramètre à modifier
|
PID : modification du paramètre
| 
Menu principal : accès à la vérification des capteurs
|
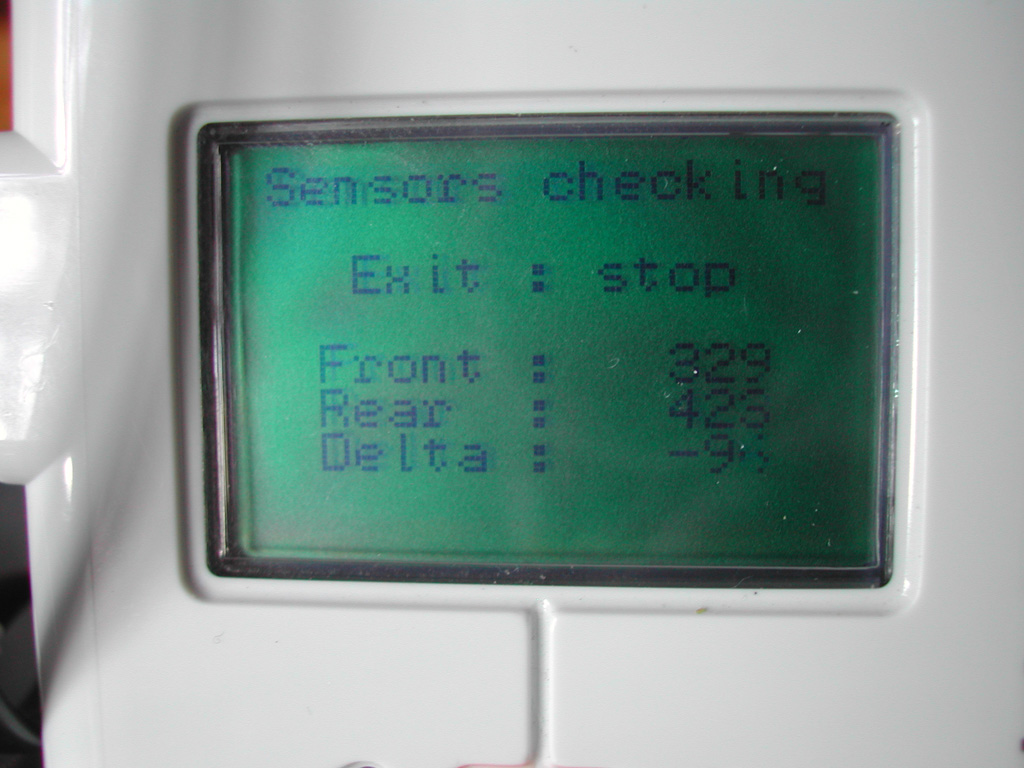
Vérification des capteurs
| 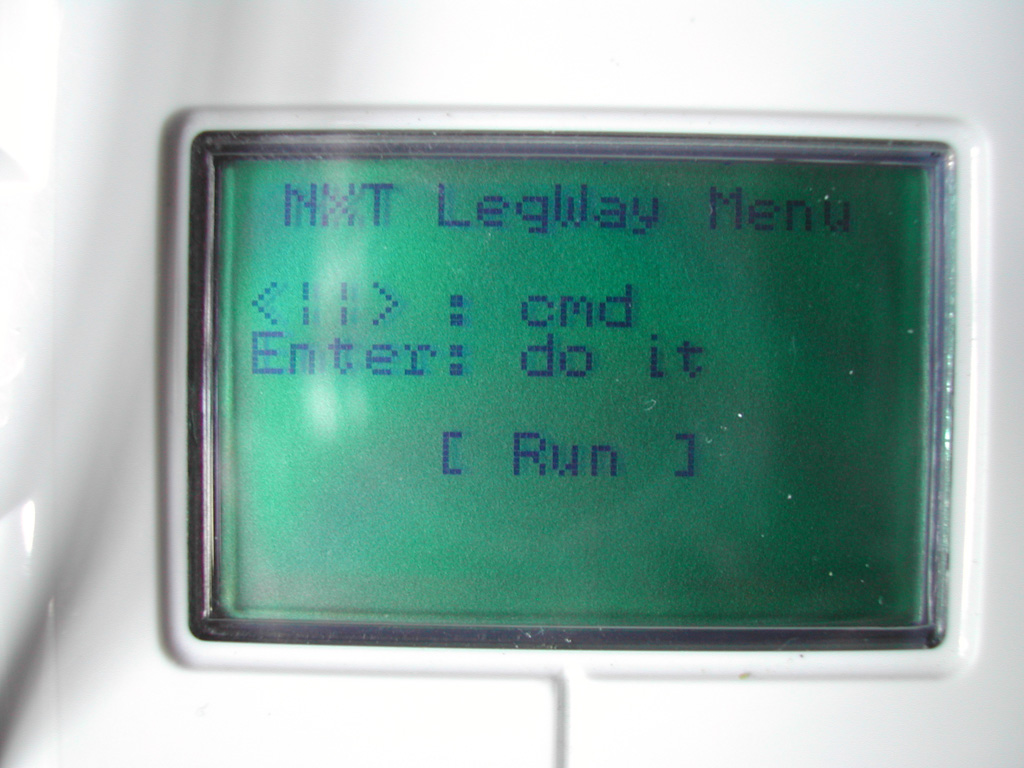
Menu principal : accès au lancement
|
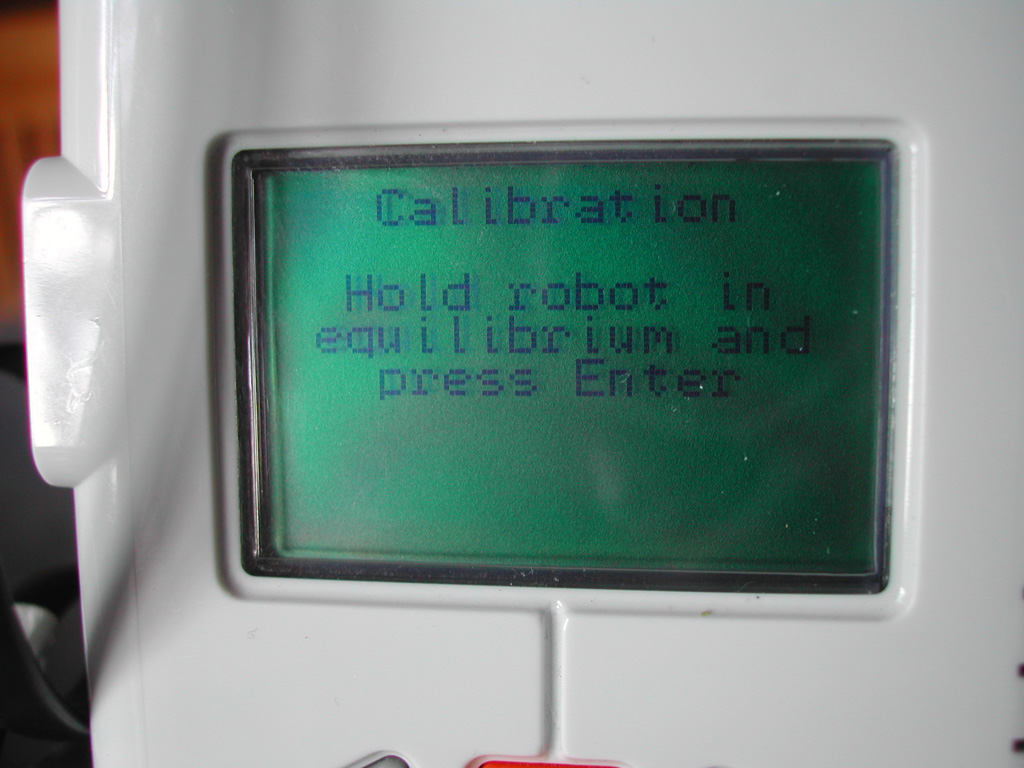
Apprentissage des conditions
|
Dans la liste des pistes à explorer :
– utiliser l’un des capteurs comme référence de la luminosité ambiante en temps réel afin de s’affranchir plus des conditions ambiantes
– filtrer les mesures par moyennes glissantes par exemple
– utiliser le résultat de l’asservissement pour modifier le comportement (par exemple si on constate que le robot fait de plus en plus de mouvements)
– ...





Vos commentaires
# Le 12 octobre 2014 à 19:33, par kouraichi En réponse à : YALW (2008)
En réponse à : YALW (2008)
je suis débutante et je veux faire une programation pour faire marcher mon robot avec ROBOTC en avant et en arriere et pour qu’ill tient l’équilibre en évitant les obstacles
# Le 14 octobre 2014 à 23:36, par Eric P. En réponse à : YALW (2008)
En réponse à : YALW (2008)
Bonsoir,
Les commentaires aux articles sont prévus pour poster des questions ou des commentaires sur les articles.
Pour les demandes d’aides, utiliser le formulaire de contact, qui permettra d’initialiser une discussion par email, plus adaptée à ce type d’échanges.
Cordialement
Eric
Répondre à ce message