 PoBot
PoBot
 Lanceur de balles (2005)
Lanceur de balles (2005)L’objectif était de lancer des balles de squash pour faire tomber des piles de quilles (cylindres en bois de 16 cm) disposés à 1-2m du robot.
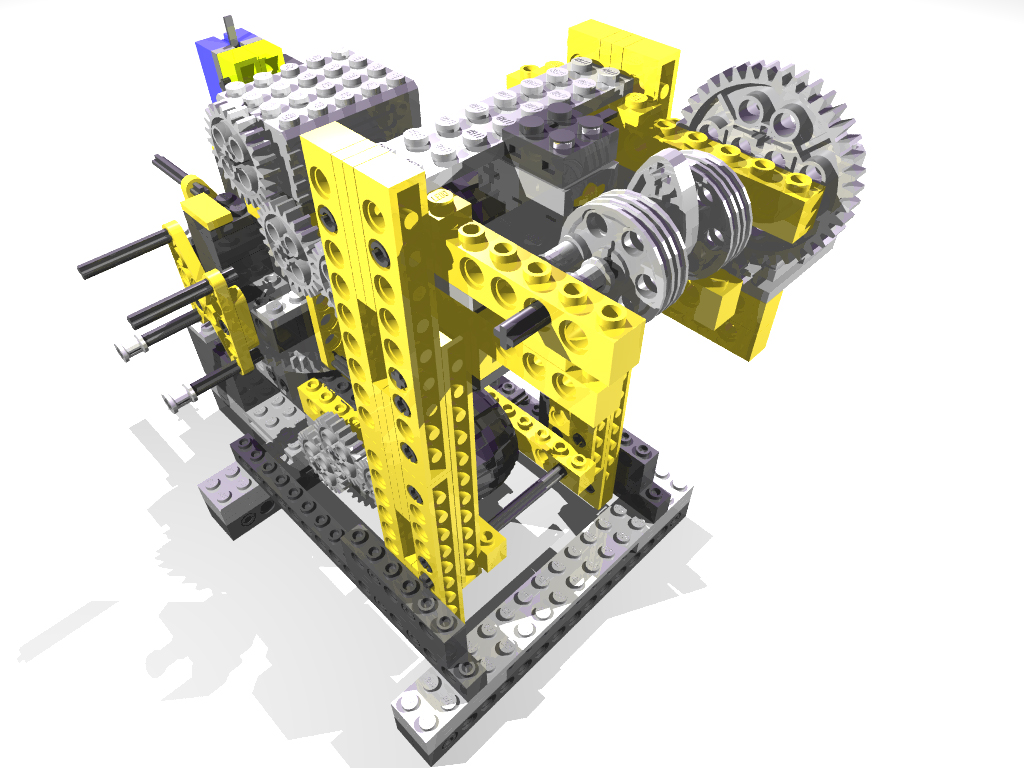
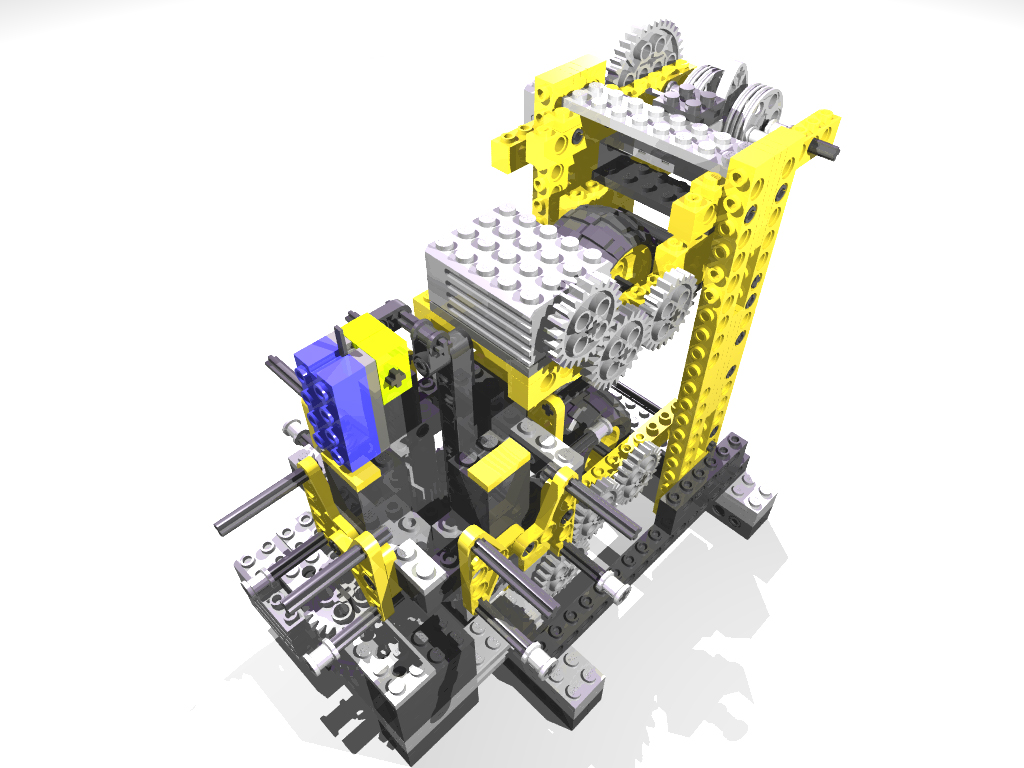
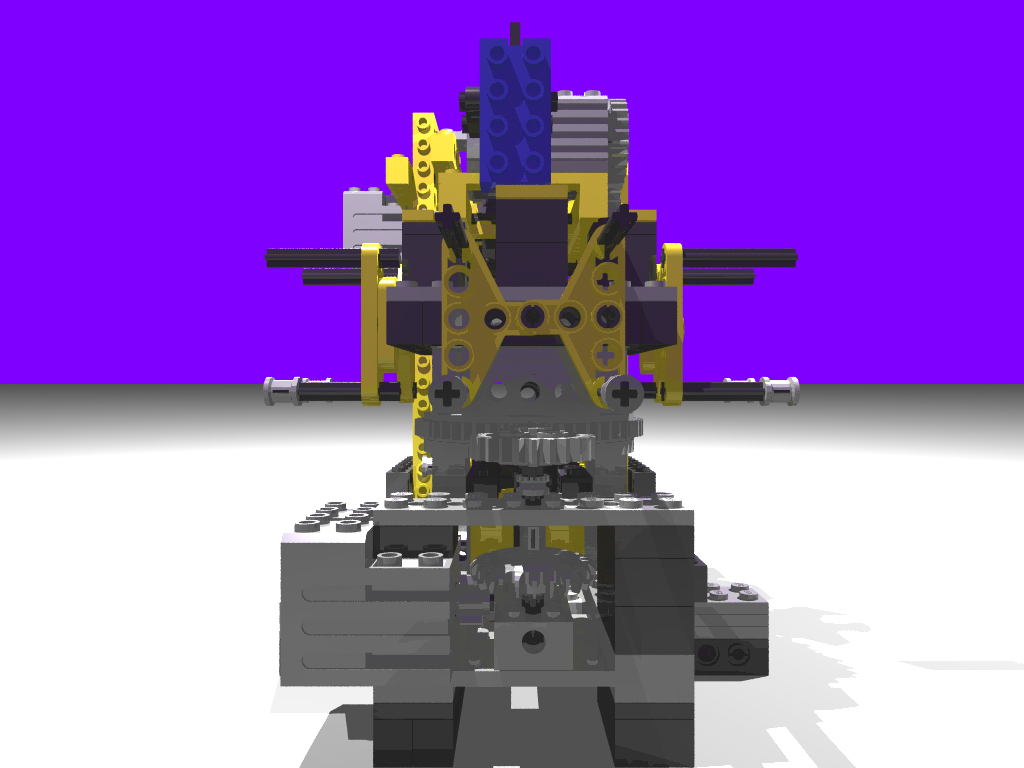
Il y a trois éléments motorisés :
– le tourniquet à balles
– une machoire d’éjection (dessous) fixe
– une machoire d’éjection (dessus) mobile
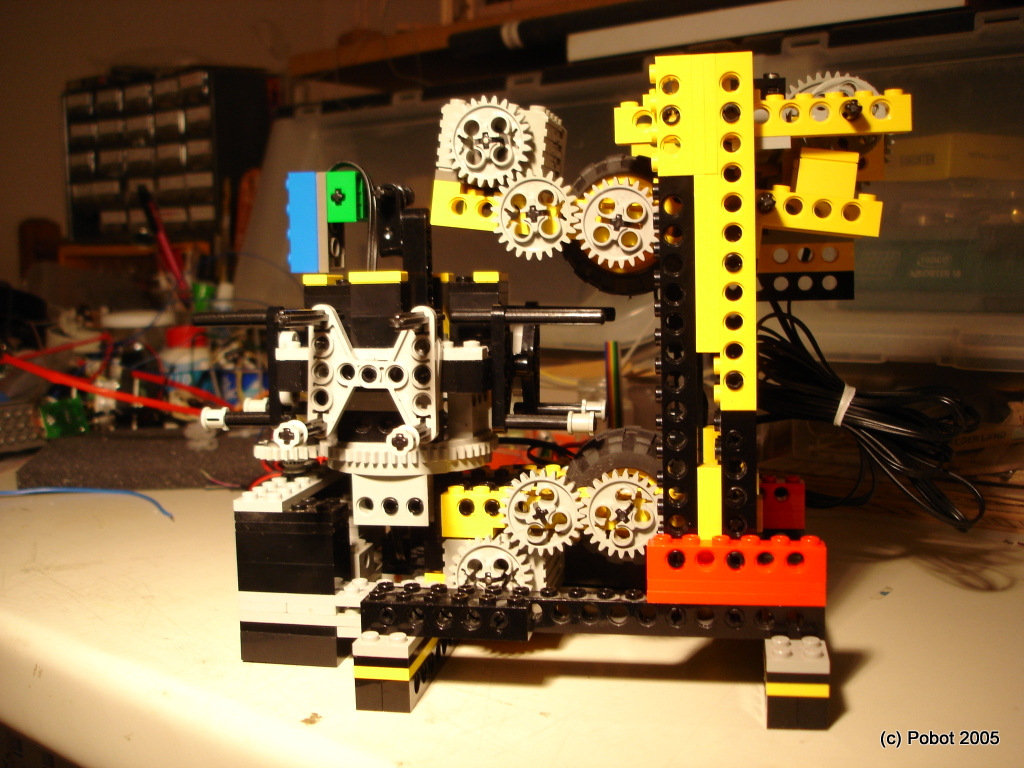
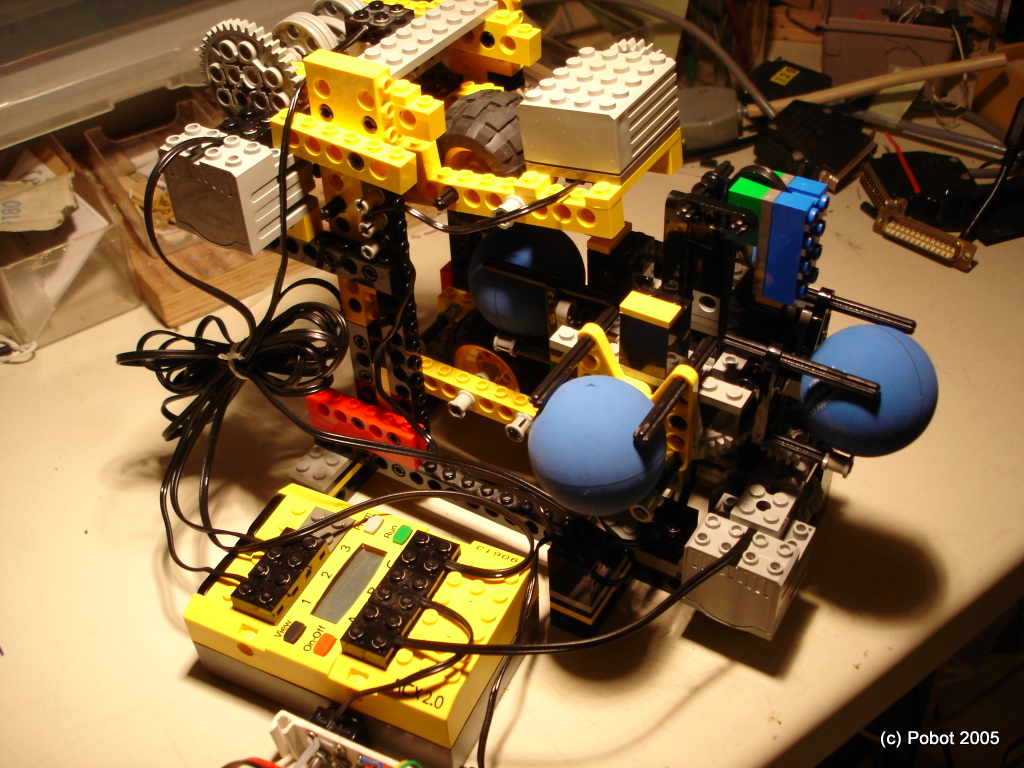
Les roues qui composent les machoires tournent vite. Le basculement coordonné à la rotation du tourniquet permet de saisir la balle et de l’accélérer pour l’éjecter à grande vitesse. Il n’y a donc pas de canon long pour canaliser l’énergie, donc des dimensions réduites, fort bien adapté à la nécessité de stocker jusqu’à 8 balles de 40 mm de diamètre.
Voici une vidéo qui montre le prototype en marche :
Bravo !!





Vos commentaires
# Le 10 février 2014 à 19:40, par Nathan En réponse à : Lanceur de balles (2005)
En réponse à : Lanceur de balles (2005)
respect mec !!
Répondre à ce message
# Le 17 décembre 2005 à 18:04, par ? En réponse à : Lanceur de balles
En réponse à : Lanceur de balles
bonjour, travaillant actuellement sur ce type de robot lanceur de balle je voudrais silvouplait si cela serait possible de m’envoyer le materiel utilisé ainsi qu’un schéma de la construction ! je suis actuellement en première S et je travaille ce projet pour mon tpe ! merci davance vous me seriez dune très grande aide
# Le 17 décembre 2005 à 18:13, par Julien H. En réponse à : Lanceur de balles
En réponse à : Lanceur de balles
Bonsoir, tu n’as pas laissé tes coordonnées 😉
Tu peux contacter directement Eric qui a créé le lanceur en Lego. Pour se faire, clique sur son prénom en haut de la page ("auteurs"), il recevra un mail, ainsi ton adresse ne sera pas visible sur le site. Bonne chance pour ton TPE.
# Le 18 décembre 2005 à 21:38, par Eric P. En réponse à : Lanceur de balles
En réponse à : Lanceur de balles
(réponse complète envoyée directement par mail)
# Le 29 juillet 2007 à 23:27, par Serge PARBAUD En réponse à : Lanceur de balles
En réponse à : Lanceur de balles
Bonjour,
Je suis un passionné de squash et j’aimerai bien untiliser un tel robot pour des exercices sur le terrain. Je na trouve aucune machine à lancer les balles spécifique squash.
Serait il possible d’avoir les plans ou un schéma de montage ?
Merci par avance
Serge parbaud
# Le 30 juillet 2007 à 09:39, par ? En réponse à : Lanceur de balles
En réponse à : Lanceur de balles
Bonjour,
Et merci pour l’intérêt relatif à nos activités 😉
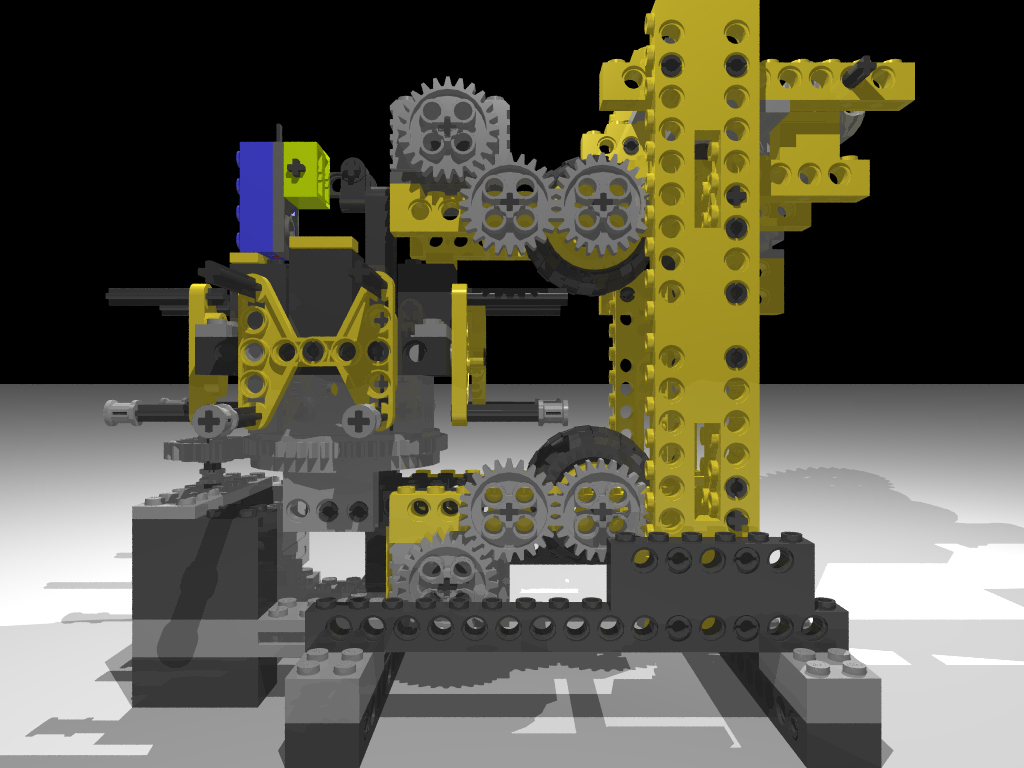
Pour ce qui est de l’utilisation de ce type de robot pour s’entraîner au squash, je pense que vous aurez remarqué qu’il s’agit d’un appareil de taille très réduite, et qui n’a pas la puissance en relation avec l’utilisation envisagée. Les plans ne vous seraient pas très utiles, et d’ailleurs ils sont disponibles sur cette page-même (cf lien "Plans du lanceur sous MLCad" plus haut).
Par contre, le principe peut bien entendu être récupéré et appliqué à une construction plus grande, utilisant des roues plus conséquentes, comme par exemple des roues de petit scooter électrique qu’on trouve souvent dans les grandes surfaces pour moins de 100 Euros. La taille des roues et leur masse sont un des facteurs déterminants pour la puissance du système, car ce sont elles qui emmagasinent l’énergie cinétique qu’elles vont transférer à la balle au moment du lancement. L’autre facteur déterminant est bien entendu la vitesse de rotation, qui contribue à l’énergie cinétique et conditionne directement la vitesse à laquelle la balle va être projetée.
Le scooter mentionné précédemment est une bonne source de pièces détachées, car beaucoup d’éléments peuvent en être récupérés : les 2 roues pour le lanceur, le moteur électrique et son dispositif de contrôle, la batterie, le chargeur, et on peut même réutiliser la partie cycle (fourche et transmission) en les adaptant pour construire l’ensemble de l’appareil. Ne me demandez pas de plans cependant, car je n’ai pas réalisé ce genre de système, et je ne fais que donner des indications sur la marche que je suivrais si je me lançais dans un projet de ce type.
J’espère que tout cela vous aidera un peu.
Cordialement
Eric
# Le 15 novembre 2007 à 04:56, par Stephane LAVENU En réponse à : Lanceur de balles- squash
En réponse à : Lanceur de balles- squash
bonjour, j’ai decouvert le squash, je joue depuis 1 an maintenant, et je cherche des bouquins, logiciels ou video pour me perfectionner ; auriez vousdes idées ?
cordialement
# Le 15 novembre 2007 à 10:57, par ? En réponse à : Lanceur de balles- squash
En réponse à : Lanceur de balles- squash
Bonjour,
Là on dépasse notre secteur de compétence. Joker 🙂
Répondre à ce message