 PoBot
PoBot
 xPo en Lego (2005)
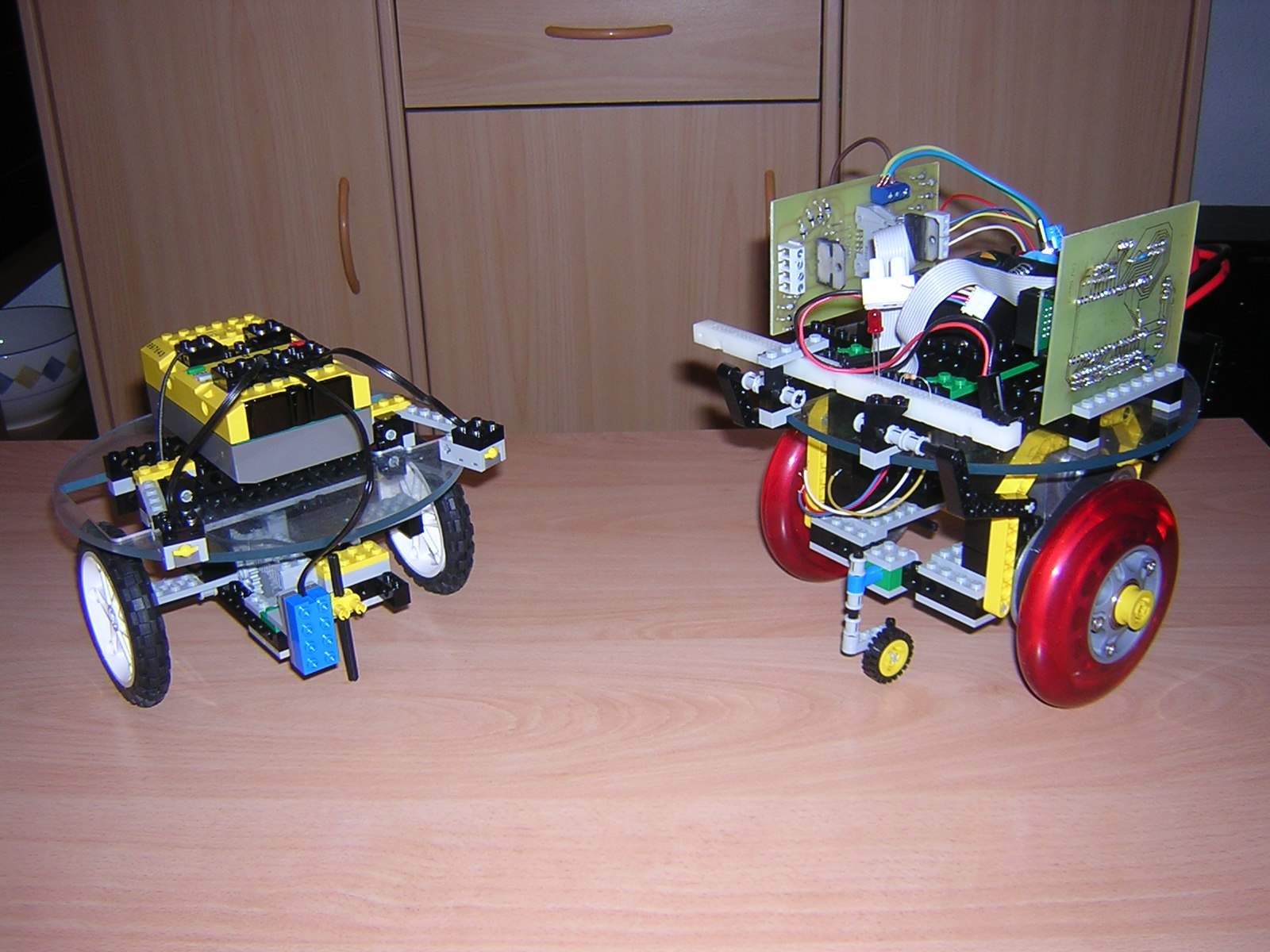
xPo en Lego (2005)Le principe ici est d’établir un parallèle entre un PoBot sur la base d’un RCX, et un PoBot sur la base d’un MR-163 (une carte électronique équipée d’un microcontrôleur Atmel AVR ATmega163). Les deux robots sont construits avec un chassis Lego.
Voici les deux robots côte à côte :
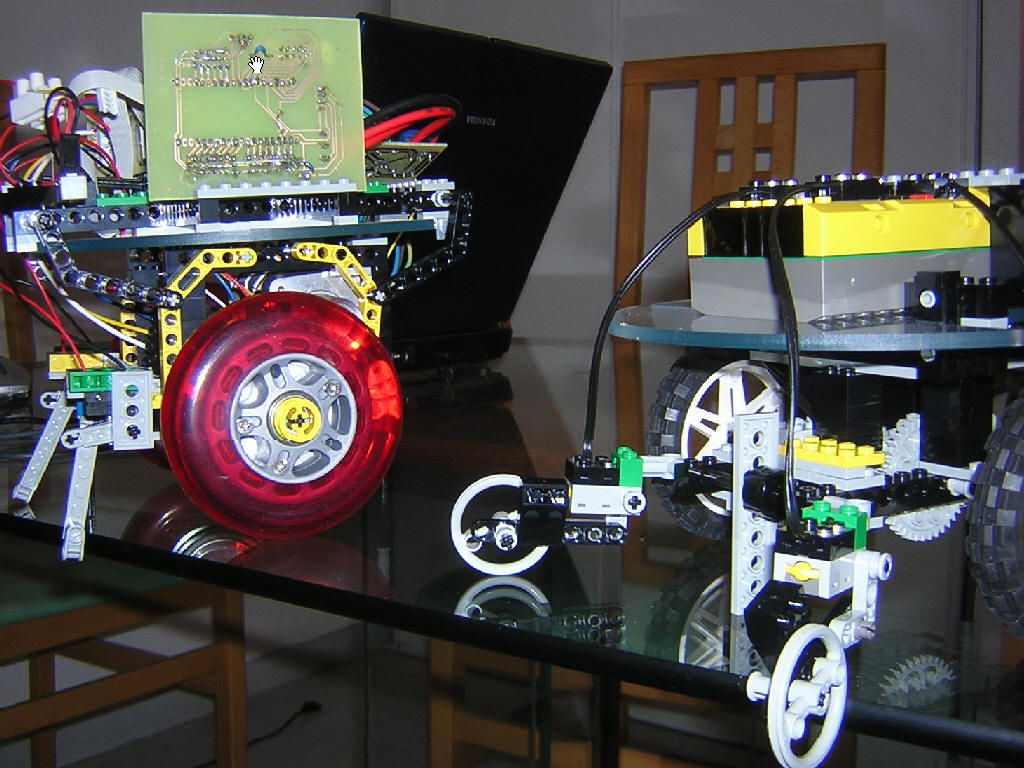
Vue particulière du système anti-chute utilisant des capteurs qui détectent le bord de la table :
Vidéo des deux robots en action :
Robots hybrides Lego / Pobot
envoyé par JulienPobot
Le code de la brique RCX (langage NQC) :
// déclaration des moteurs
#define moteur_left OUT_A
#define moteur_right OUT_C
// déclaration des capteurs
#define contact1 SENSOR_1
#define contact3 SENSOR_3
task main()
SetSensor (contact1, SENSOR_TOUCH) ;
SetSensor (contact3, SENSOR_TOUCH) ;
start action ;
task action()
while (true)
OnRev (moteur_left) ;
OnRev (moteur_right) ;
if (contact3 != 1)
OnFwd (moteur_right) ;
OnFwd (moteur_left) ;
Wait(100) ;
Off(moteur_right) ;
OnRev (moteur_left) ;
Wait(100) ;
if (contact1 != 1)
OnFwd (moteur_right) ;
OnFwd (moteur_left) ;
Wait(100) ;
Off(moteur_left) ;
OnRev (moteur_right) ;
Wait(100) ;
Le code de la carte électronique Atmel (langage C) :
#include
#include <stdio.h>
#include <iom163.h>
void port_init(void)
DDRD = 0x00 ; // entrée des switch
DDRC = 0xFF ; // sortie (moteur)
PORTC = 0x00 ;
DDRA = 0xFF ; // touche enable
PORTA = 0x00 ;
void DelayC(void)
unsigned char a ;
int i ;
for (i=0 ;i<5 ;i++) // délai court
for (a = 1 ; a ; a++) ;
char testbit(char reg, char n)
char m=1 < < n ;
// teste la valeur haute ou basse du port entrée
return (reg & m) ;
int main(void)
int j ; // compteur de pas moteur
port_init() ;
PORTA = 0xFF ; // autorisation enable
i = 0 ;
while (1)
// les deux roues avancent
PORTC=0b00010001 ;
DelayC() ;
PORTC=0b01000100 ;
DelayC() ;
PORTC=0b00100010 ;
DelayC() ;
PORTC=0b10001000 ;
DelayC() ;
if (testbit(PIND, 7))
// un des capteurs est déclenché
for(j = 1 ;j <= 100 ;j++)
// les deux roues reculent
PORTC=0b10001000 ;
DelayC() ;
PORTC=0b00100010 ;
DelayC() ;
PORTC=0b01000100 ;
DelayC() ;
PORTC=0b00010001 ;
DelayC() ;
for(j = 1 ;j <= 100 ;j++)
// une seule roue tourne (celle du coté où le capteur est enclenché)
PORTC=0b00010000 ;
DelayC() ;
PORTC=0b01000000 ;
DelayC() ;
PORTC=0b00100000 ;
DelayC() ;
PORTC=0b10000000 ;
DelayC() ;
if (testbit (PIND, 4))
// le capteur opposé est enclenché
for(j = 1 ;j <= 100 ;j++)
PORTC=0b10001000 ;
DelayC() ;
PORTC=0b00100010 ;
DelayC() ;
PORTC=0b01000100 ;
DelayC() ;
PORTC=0b00010001 ;
DelayC() ;
for(j = 1 ;j <= 100 ;j++)
PORTC=0b00000001 ;
DelayC() ;
PORTC=0b00000100 ;
DelayC() ;
PORTC=0b00000010 ;
DelayC() ;
PORTC=0b00001000 ;
DelayC() ;
// ne pas tenir compte de la dernière ligne




