 PoBot
PoBot
 Robot suiveur de ligne (2011)
Robot suiveur de ligne (2011)Un robot suiveur de ligne n’est pas forcément programmé, il peut être conçu pour réagir directement par une simple connexion électronique entre ses capteurs et ses moteurs.
La mécanique n’a pas non plus besoin de sortir des usines de Dassault Systèmes avec des semaines de modélisation CAO. Une bonne base en bois faite avec soin sera bien meilleure qu’un assemblage d’aluminium pour lequel on ne disposerait pas du bon matériel ou des bons accessoires : les vis dans le bois sont plus simples à assembler et plus efficaces que les boulons et écrous s’ils ne sont pas montés selon de bonnes pratiques.
L’électronique nécessaire à réaliser un suivi de ligne est plus simple et moins sensible aux pannes : des relais pour les moteurs, quelques résistances et parfois un amplificateur opérationnel.
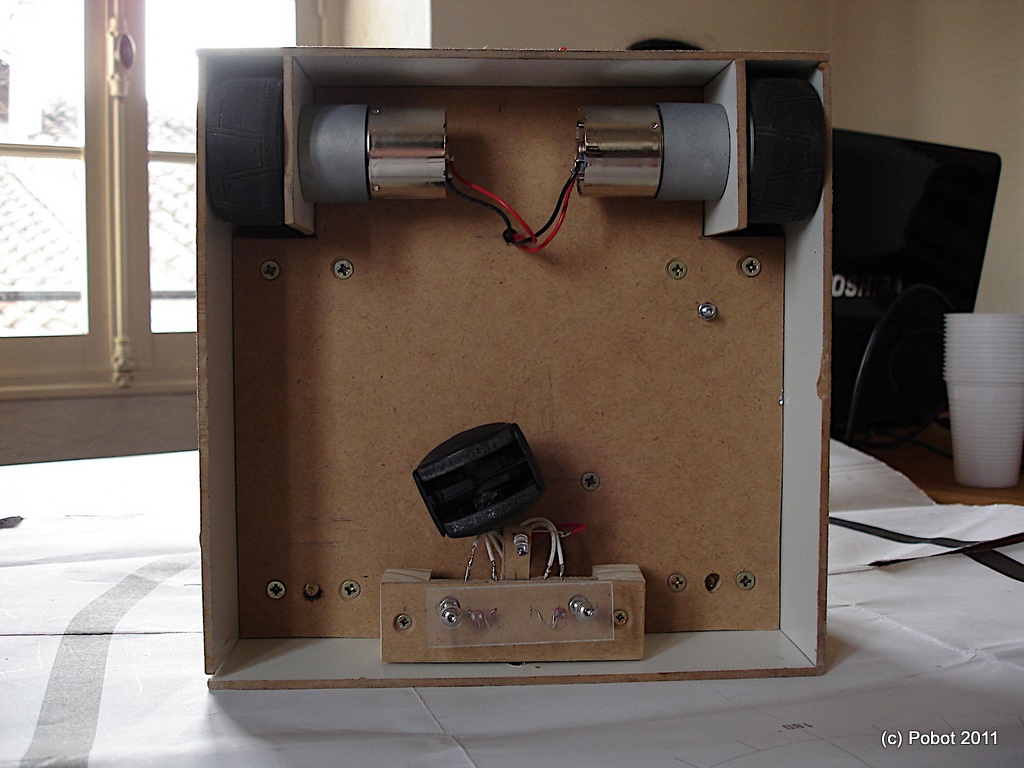
Vous trouverez un bon exemple de montage électronique dans l’article du robot Mousey.




