PoBot
PoBot
 NanoBot (2007)
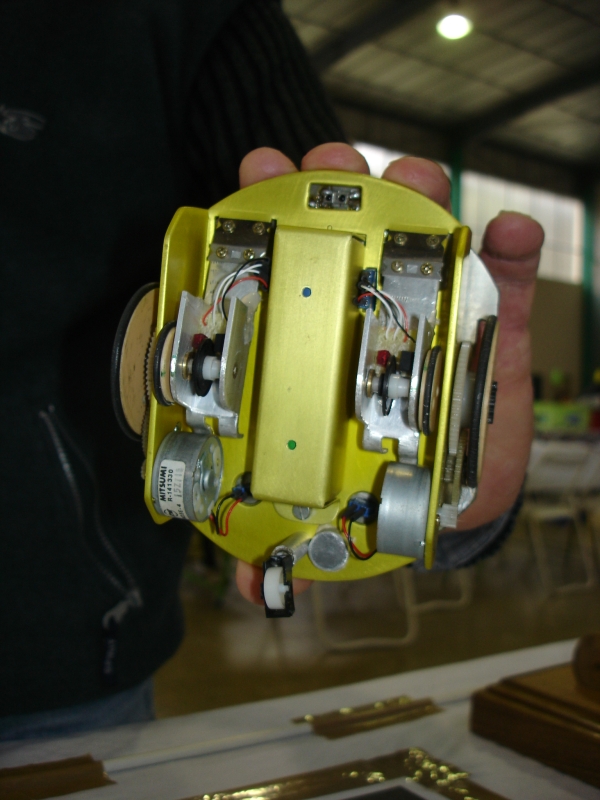
NanoBot (2007)Le robot que nous allons vous présenter a été réalisé avec un maximum de récupération :
– moteurs d’ouverture de tiroir de lecteur CD
– engrenages de lecteur de disquettes
– codeurs de molette de souris
– métal de carcasses de boitiers
– jantes des roues idem
– etc...
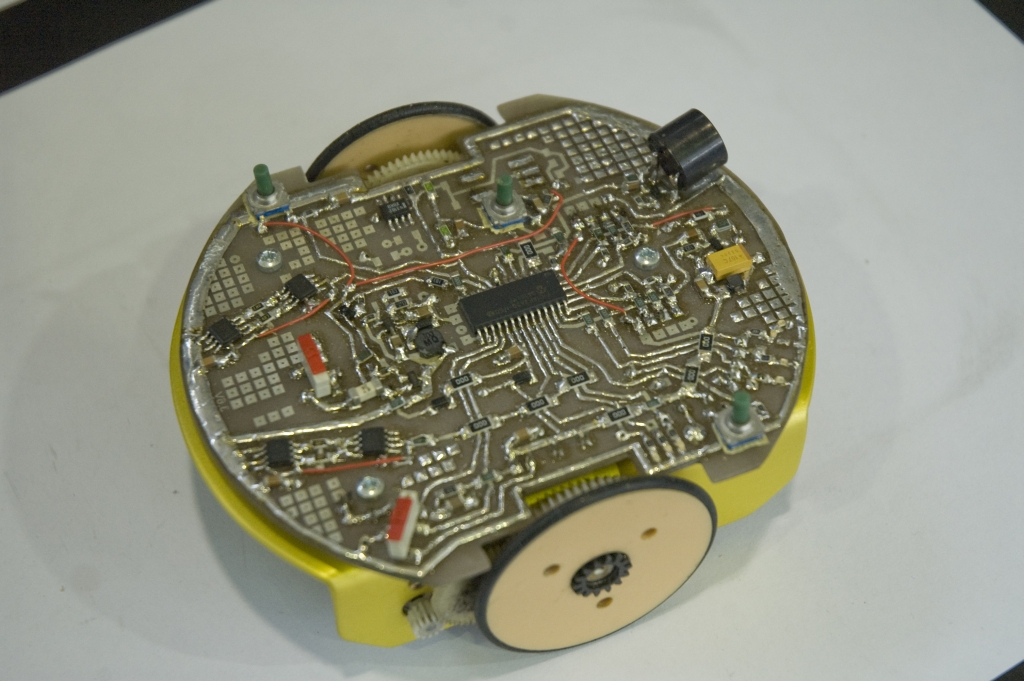
Quant à l’électronique, elle a été soudée à la main à partir de différents circuits de récupération, assemblés
ensemble en enlevant les parties superflues, en déroutant certaines pistes pour leur donner de nouvelles fonctions et
en soudant sur des pistes CMS des composants dédiés à la robotique : drivers moteur, alimentation, leds, etc...
Côté énergie, c’est aussi de la récup’, avec un élément Li-ion récupéré d’une batterie de portable HS. Le robot est
très économe, car nous l’avons fait fonctionner toute une journée de 7h30 à 18h30 ! Une endurance qui doit
beaucoup à la conception de son électronique : pas de superflu dans les circuits.

Le programme est écrit en assembleur et gère tout le fonctionnement : contrôle des moteurs, de l’odométrie, de la
détection d’obstacle et de l’asservissement général et de la détection des erreurs (ex:overflow de la boucle
d’asservissement). Plus la gestion des fréquences différentes du buzzer, histoire de ne pas laisser une fraction
d’hertz de côté :)
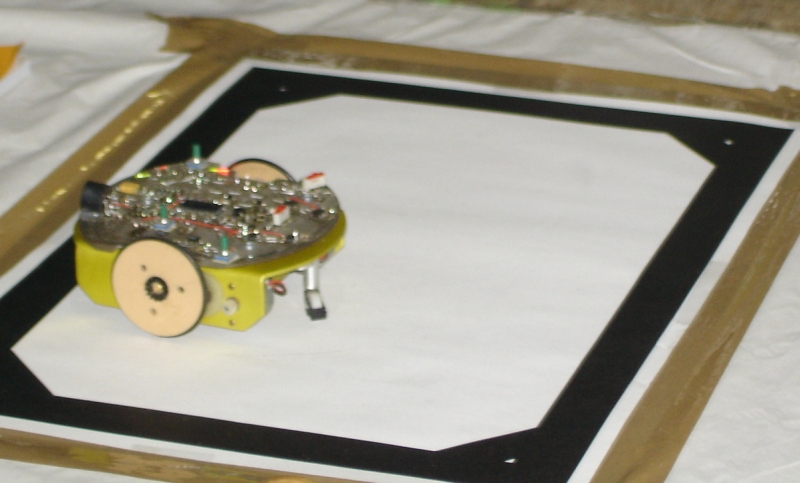
Un grand bravo à Henri pour cette belle réussite. Wall-E n’a qu’a bien se tenir. Nous faisons des démonstrations
régulièrement avec ce robot très fiable malgré ses matériaux de récupération : ici, à Ollioules en mars 2008 pour les
Rencontres de l’Externat St Joseph et les Trophées Planète Sciences, mais également à la Fête de la Science etc.