 PoBot
PoBot
 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)Le matériel utilisé est le suivant :
– moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17.
– roues de roller, poulies et courroies crantées
– drivers de moteurs M325 de Soprolec
– carte électronique programmable Arduino Duemilanove
– caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology
– mécanique en aluminium et plexiglas, architecturé par des tiges filetées
– batteries Lithium Polymère (packs de modélisme)
C’est une architecture "classique" pour l’association Pobot puisque c’est celle utilisée sur le premier robot du club "Pobot Original" de 2003. Dans le cadre de nos projets en robotique au CERAM / SKEMA Bachelors, nous avons reçu l’aide et les conseils des membres de l’association (Frédéric, Henri, Julien).
Les logiciels sont les suivants :
– Arduino pour la programmation générale des déplacements (AVR)
– Yagarto pour la programmation spécifique de la caméra (ARM)
– Processing pour donner les consignes de déplacements et la télémétrie
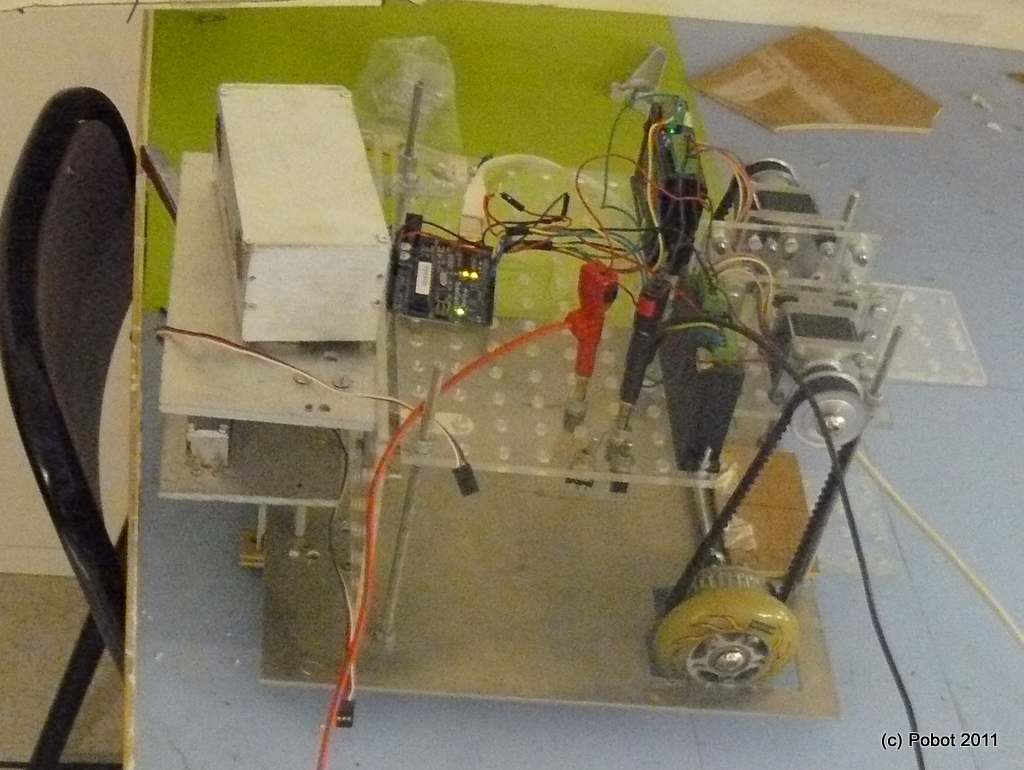
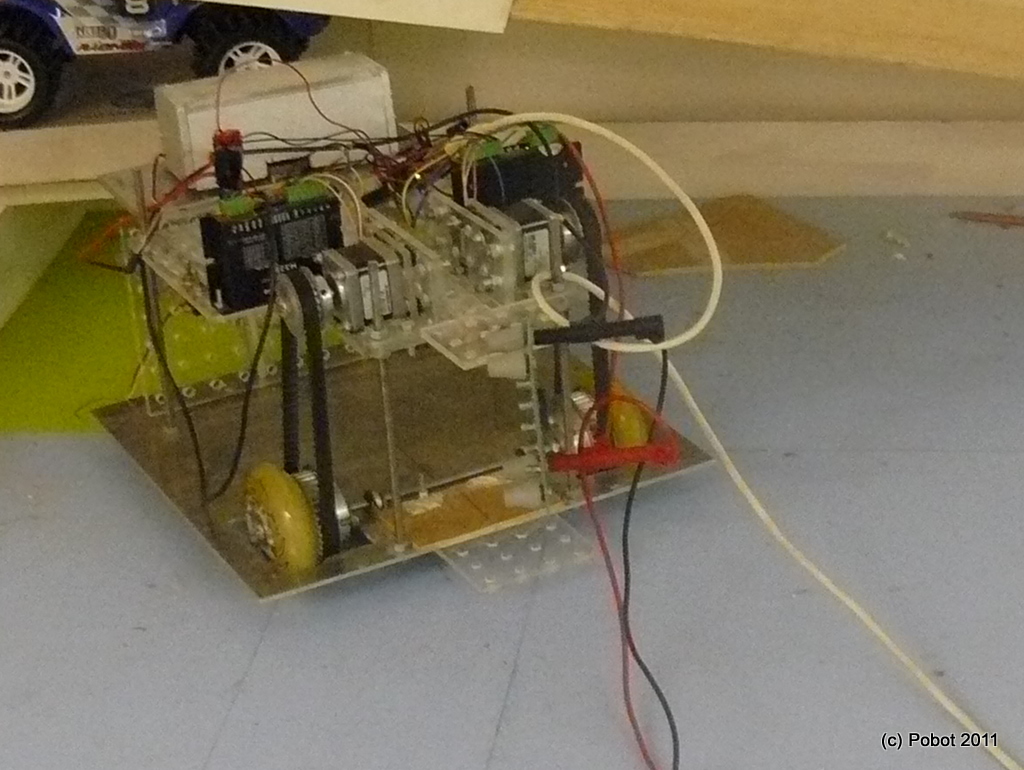
Photos et vidéos
Quelques vues du robot :

Une vidéo tournée lors des Rencontres d’Ollioules 2009, une manifestation de robotique mobile organisée dans le Var pendant les Trophées PACA de Planète Sciences.
CerBac I, mobile robot using stepper motors and Arduino from JulienPobot on Vimeo.
Projet 2009
Voici le rapport de conception du robot CerBac :

Gestion des moteurs
Pour que le contrôleur de moteur pas-à-pas M325 génère la séquence de tensions nécessaire à un moteur bipolaire (deux bobines alimentées successivement, dans un sens de courant puis dans l’autre), il faut envoyer un front montant à la vitesse souhaitée : il s’agit d’une variation de la fréquence, et non rapport cyclique donc pas de PWM.
Pour gérer une tâche de génération de ces fronts en parallèle de la boucle logique de contrôle du robot, des capteurs et des communications, on recourt à la librairie MsTimer2 mise à disposition par la communauté Arduino.
Voici une présentation :

Projet logiciel
Début janvier, un des projets du robot Cerbac a été finalisé. Il consiste à déplacer le robot vers un point de la table de jeu.
Cette table est représentée sur une interface graphique (avec Processing) sous la forme d’un rectangle vert. En cliquant dans ce rectangle, le robot reçoit les coordonnées et se charge d’adapter ses vitesse (on parle d’asservissement) pour se déplacer vers ce point.
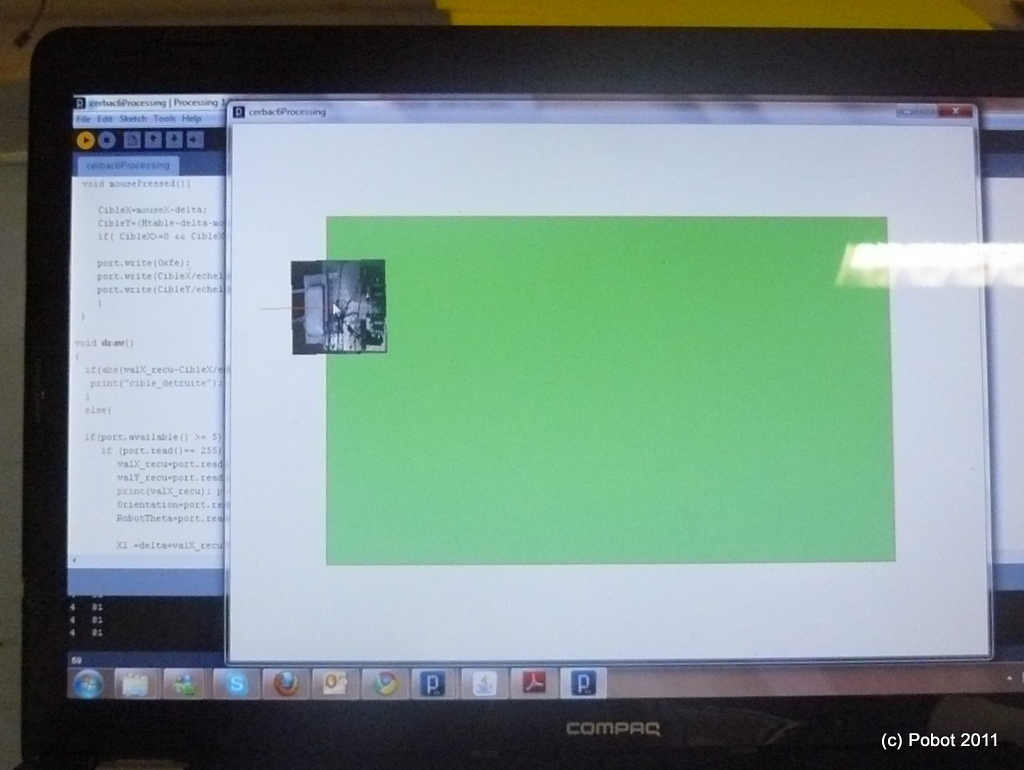
L’algorithme choisi est appelé "turn & go" : le robot calcul l’angle nécessaire pour adapter son cap actuel à la direction du point cible, tourne jusqu’à s’aligner, puis avance en ligne droite.
A chaque pas commandé au moteur, le robot effectue un calcul trigonométrique pour mettre à jour ses coordonnées.
Ci-joint les programmes :

Une facebook page a été crée sur Cerbac 2, vous pouvez voir ainsi toutes les videos du projet.





Vos commentaires
# Le 5 avril 2011 à 08:25, par Marc En réponse à : CerBac, un robot Arduino
En réponse à : CerBac, un robot Arduino
J’ai vu la vidéo et j’ai constaté en fait que ton robot marche bien et tourne bien. Côté esthétique, difficile de juger sans sa carrosserie. tondeuse robot
Répondre à ce message