 PoBot
PoBot
 Le robot Mousey (2010)
Le robot Mousey (2010)Il est possible de réaliser facilement et en un week-end un petit robot amusant en recyclant une vielle souris mécanique.
Vous trouverez la recette complète ici : http://cdn.makezine.com/make/mousey.pdf
Ainsi qu’un petit correctif du schéma : http://www.streettech.com/robotbook...
Afin de tester ce robot et ses comportements, j’ai construit deux versions de cette souris "BEAM".
Les étapes de la construction en images :
Pour cette application, les souris mécaniques sont plus intéressantes que les souris optiques car on y trouve des capteurs photosensibles récupérables (dans une souris optique, les odomètres sont remplacés par une caméra).
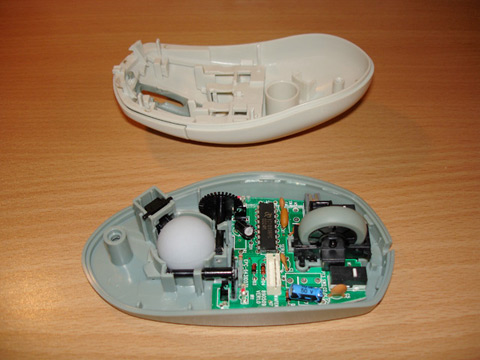
La souris est entièrement vidée. Le démontage complet se fait en quelques minutes.
Les LED des odomètres sont dessoudées, elles deviendront les "yeux" du robot.
Certains éléments peuvent être conservés pour d’autres projets comme la roulette de défilement qui peut servir éventuellement de roue ou un petit galet presseur qui fera une roue folle très acceptable.
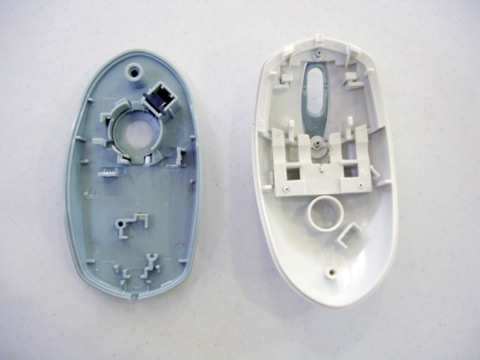
J’ai réséqué les parties inutiles à la pince coupante, puis effectué une finition en fraisant les dernières excroissances à la mini perceuse (une Proxxon IB/E équipée d’une fraise sphérique).

La coque est maintenant prête à accueillir les éléments du robot.
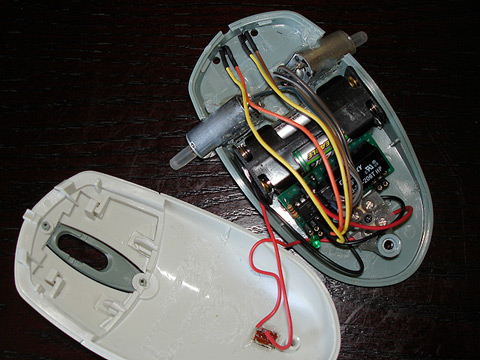
Les moteurs proviennent de lecteurs de CD-ROM HS.
Les roues improvisées sont des morceaux de durites en caoutchouc emboîtées sur l’axe des moteurs. Pour augmenter un peu le diamètre des axes, j’ai ajouté deux couches de gaine thermorétractable.
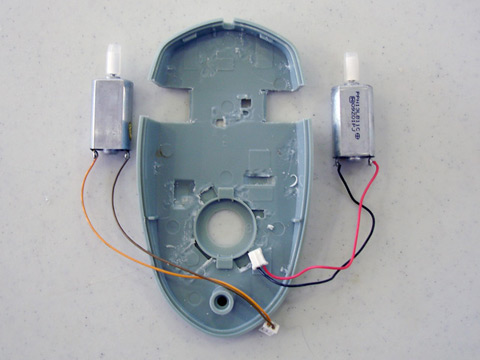
Après avoir vérifié le bon fonctionnement des moteurs, on peut les fixer au boîtier. Personnellement, je les ai collés au pistolet à colle.
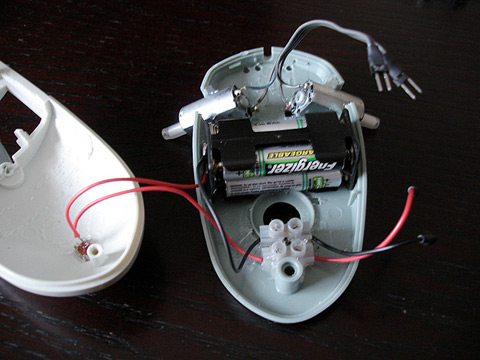
J’ai ajouté un domino au fond de la souris pour faciliter la mise en place de l’électronique.
L’interrupteur général est monté sur la coque supérieure.
Comme vous pouvez le voir, le robot est alimenté par un coupleur de 4 piles AAA (LR3).
Sur la première version, j’ai relié directement tous les composants entre eux. Mais de nombreux fils récalcitrants se mettent constamment en travers pendant la fermeture du boîtier. Aussi, dans la deuxième version, j’ai créé un petit montage électronique à partir d’une plaque de prototypage à pastilles.
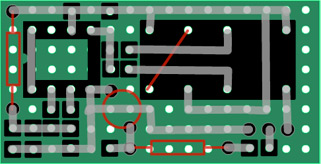
Voici le schéma... Les pistes grisées se trouvent sur la face cachée.
La réalisation du circuit demande de la patience et de la minutie. Le résultat n’est pas très fin, mais ça fonctionne !
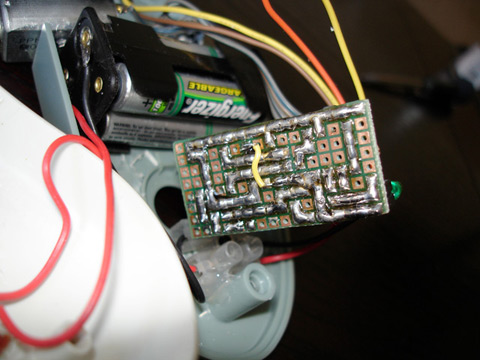
Plutôt que de souder (je devrais dire "braser") directement les capteurs et les moteurs sur la carte électronique, j’ai préféré monter des connecteurs HE14 de manière à pouvoir facilement modifier le sens des branchements.
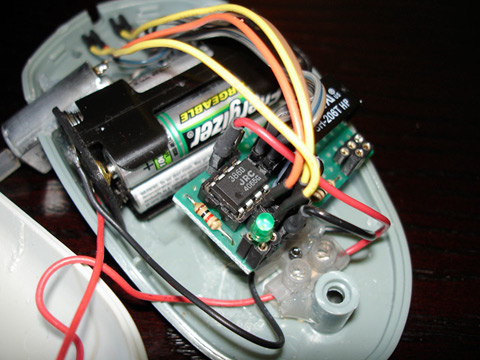
Voici une vue intérieure du robot avec tous les éléments en place, mis à part le témoin de mise en route (LED verte) que je n’ai pas monté sur le boîtier.
Sur cette version prévue pour une utilisation en suivi de lignes, j’ai percé des trous au fond de la coque afin d’y placer les capteurs photosensibles et éventuellement une source d’éclairage par LED.
Dans la version "poursuite de lumière" les capteurs sont placés à l’extérieur de l’engin. En croisant ou en décroisant ces récepteurs on change le comportement de l’engin qui va alors "fuir" la lumière au lieu de s’en approcher.
Les petits Silentblocs en élastomère utilisés comme roues et les petits poussoirs du détecteur d’obstacles proviennent des mêmes lecteurs de CD-ROM que ceux utilisés pour les moteurs.
Afin de pouvoir ajuster facilement la durée de recul après une collision, j’ai remplacé la résistance en aval du condensateur par un potentiomètre (récupéré dans un vieux magnétoscope).

Pour la version "suivi de lignes" les capteurs sont placés sous la souris.

Le BEAM en pleine action !





Vos commentaires
# Le 5 juillet 2011 à 17:37, par aymeic En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
bonjour ou serait-il possible d’avoir
d’une plaque de prototypage à pastilles.
parceque je mis connait vraiment pas en electronique et je voudrais de l’aide merci
# Le 5 juillet 2011 à 21:19, par Julien H. En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
Bonjour,
On en trouve en ligne sur le site Gotronic.fr qui propose tous les composants électroniques et les outils pour faire un robot.
Bonne chance et n’hésitez pas à nous recontacter et à vous inscrire à notre liste de diffusion.
# Le 2 décembre 2011 à 19:13, par ? En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
Bonjour,
J’aimerai savoir si il était possible d’avoir une liste du matériel nécessaire pour la construction de ce robot, et où il serait possible de le trouver, car je n’y connait rien à la robotique mais j’aimerai débuter et ce robot me semble idéal .
Merci d’avance .
# Le 3 décembre 2011 à 04:14, par V.I.N.C.E.N.T En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
La liste des composants est indiquée dans le document en PDF présent au début de l’article.
Ce sont des éléments courants que l’on peut se procurer facilement dans des boutiques d’électronique sur Internet comme Gotronic.fr.
Personnellement, j’ai choisi pour l’alimentation un coupleur de 4 piles AAA afin de pouvoir utiliser des batteries rechargeables.
De plus, j’ai fabriqué des petits cordons et des connections à base de connecteurs HE14 mâles et femelles. Ainsi il est plus facile de corriger le câblage des moteurs ou de tester différents types de LEDs IR (en effet, les LEDs Infrarouges récupérées dans les souris à boules ou dans les appareils électroniques sont plus ou moins sensibles à la lumière visible et aux parasites).
Pour réaliser les cordons il suffit de souder les connecteurs sur les fils et d’isoler la brasure par de la gaine thermorétractable.
# Le 7 décembre 2011 à 17:55, par ? En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
Merci beaucoup pour votre réponse ,
pour finir j’aimerai juste savoir comment fabriquer le montage constitué d’une plaque de prototypage à pastilles. Je suis désolé mais dans se domaine je ne connaît vraiment rien .
# Le 11 décembre 2011 à 08:33, par V.I.N.C.E.N.T En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
Pour réaliser le circuit électronique il y a différentes solutions :
Une première (la plus simple pour un débutant en électronique) est de souder (braser) directement les composants ensemble comme il est indiqué dans le fichier PDF. Pour cela il faut seulement un fer à souder et un peu d’étain.
La seconde est d’utiliser une plaque de prototypage à pastilles au pas de 2,54mm (c’est la solution que j’ai choisie). Les composants sont soudés sur la plaque et les circuits sont réalisés en reliant les pastilles entre elles par une goutte d’étain.
C’est à la portée de quiconque arrive à manier un fer à souder l’étain.
Les composants, connecteurs et fils sont placés sur la face en époxy (ou fibre de verre), les pistes en étain (en gris sur le schéma) sont réalisées sur la face cuivrée.
Pour avoir un système évolutif, j’ai ajouté des connecteurs (en noir dans mon schéma) entre la carte et certains composants (en rouge).
Les plaques sont disponibles dans les boutiques d’électronique.
D’autres solutions existent comme la réalisation de circuits imprimés gravés par procédés chimiques ou mécaniques, mais cela nécessite plus de matériels et de savoir faire.
# Le 14 avril 2012 à 12:23, par Luc En réponse à : Le robot Mousey (2010)
En réponse à : Le robot Mousey (2010)
Bonjour, j’ai acheté tous les composants nécessaire pour la réalisation du robot mais je ne comprend le choix du relais. Comment se font les contacts ?
Pourquoi utiliser ce type de relais ?
Merci
Répondre à ce message