 PoBot
PoBot
 Motorisation : suite et fin (du moins je l’espère)
Motorisation : suite et fin (du moins je l’espère)Dans notre épisode précédent, nous en étions arrivé au stade où il était question de faire nager la brasse coulée dans le liquide de refroidissement à nos moteurs, histoire qu’ils ne se transforment pas en grille-pain sous la charge.
Tout cela semblait la bonne voie, et il ne restait plus qu’à valider expérimentalement.
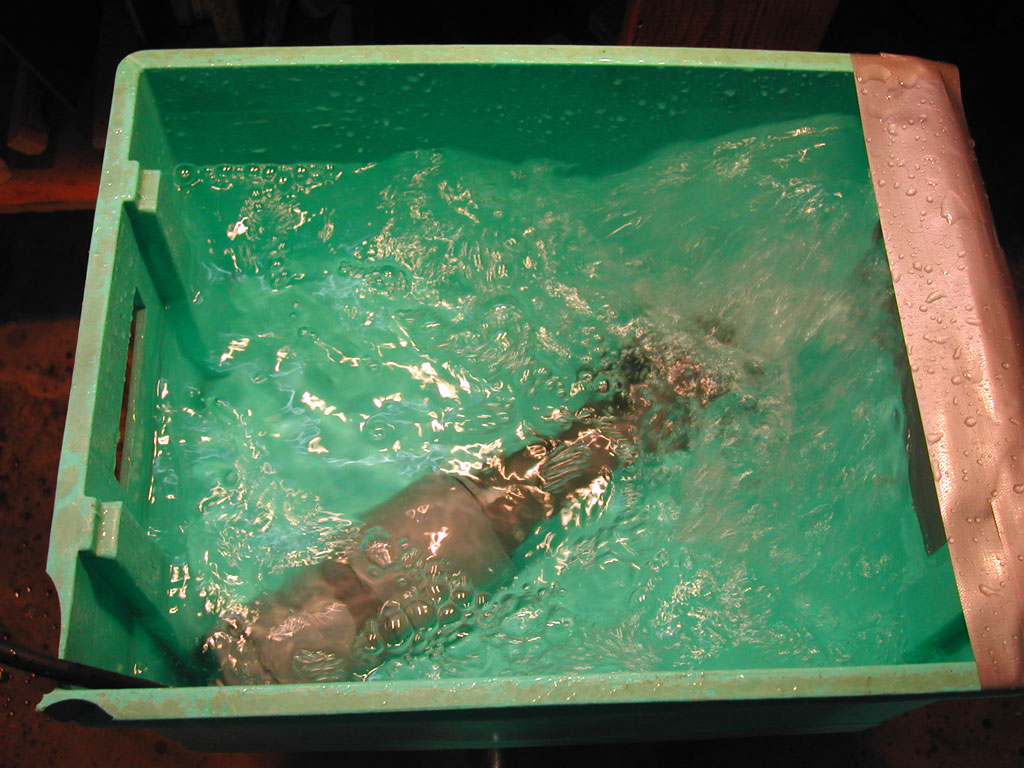
On reprend les mêmes, on remplit le compartiment moteur de liquide de refroidissement, on graisse copieusement le tube d’étambot pour assurer l’étanchéité, et zou, tout le monde au fond de la caisse pleine d’eau et pleins gaz pendant 20 minutes.
Résultat des courses
Premier constat : ça brasse plutôt bien, et il faut d’ailleurs faire gaffe à ce que les éclaboussures n’atteignent pas l’alimentation. Vu qu’elle est capable de débiter 30A sous 60V [1], ça peut faire du vilain si elle prend l’eau. Ci-dessous un aperçu de la bête pour vous donner une idée.

Deuxième constat : la consommation électrique se stabilise à 7A sous 12V. C’est honorable, mais pas démesuré, et en tout cas en phase avec ce que Norbert LECA, de chez LECMA-RC m’a donné comme indication.
Edit 08/08/12 : je viens d’apprendre que M. LECA est décédé de maladie en mai dernier (cf http://www.forumsousmarin.fr/forum/...) et que sa société a cessé son activité début 2010. Bien triste nouvelle et grande perte pour le milieu des modélistes sous-mariniers.
Troisième constat : au bout d’un moment, l’eau commence à devenir un peu laiteuse (tant qu’elle est brassée), et à dégager une légère odeur chimique. Curieux. Je mets cela tout d’abord sur un phénomène de cavitation au niveau de l’hélice, qui aurait tendance à créer des micro-bulles d’air. Mais ça n’explique pas l’odeur.
Au bout du temps de test prévu (20 minutes), on coupe les gaz et on observe. En sortant le bloc de l’eau, je constate que le corps est à peine tiède. Jusque là c’est plutôt rassurant. Par contre, ce qui l’est moins est que de la graisse fuse par l’embout du graisseur, et également par le palier au niveau de l’hélice. Ceci traduit une surpression évidente à l’intérieur du compartiment moteur.
On ouvre donc rapidement, pour constater que premièrement le liquide est fumant, et surtout, qu’il en manque la moitié. Conclusion, les échanges thermiques avec le milieu ambiant au travers des parois PVC ne sont pas aussi bons qu’escompté. Et m..... On n’est pas encore sorti d’affaire.
Et maintenant
La seule solution semble passer par un refroidissement actif, c’est à dire avec une circulation forcée à l’aide d’une pompe. Deux options possibles :
– ajouter un serpentin prévu pour cela autour du moteur et créer un circuit d’eau dedans
– faire circuler le liquide de refroidissement dans un système de dissipateur pour évacuer les calories
La première option ne rentre pas dans le compartiment actuel. Quant à la deuxième, elle va faire évoluer notre projet vers quelque chose à côté de quoi une mission lunaire ressemble à une promenade dominicale en forêt.
Remise à plat
Il est temps de remettre tout en question, en essayant de se poser les bonnes questions.
- pourquoi le moteur chauffe ?
Parce qu’il doit fournir des efforts tout en étant en sous-régime. Le type de moteur utilisé a un régime à vide de l’ordre de 11 000 tours/minute. Ici, compte tenu des freinages induits par l’eau, la graisse et le liquide de refroidissement, on doit se situer au mieux à la moitié. Dans ce cas, la force contre-électromotrice du moteur est inférieure à son régime nominal, et la proportion d’énergie dissipée par effet Joule suite à la composante purement résistive du moteur est donc plus forte
- pourquoi tourne-t-il en sous-régime ?
Parce que du fait de ses caractéristiques, et surtout de son couple, il aurait fallu intercaler un réducteur pour qu’il puisse fournir les efforts impliqués, tout en tournant à son régime nominal
- pourquoi n’y a-t-il pas de réducteur ?
Parce qu’il n’y a pas la place.
Conclusion : le problème vient du choix du moteur. Puisqu’il n’y a pas la possibilité d’adapter mécaniquement son régime de fonctionnement, il en faudrait un qui possède nativement un régime nominal proche de notre régime de fonctionnement.
Solution : Allô, LECMA ?
Et oui, M. LECA va me tirer d’affaire en me suggérant effectivement un moteur différent, dont les caractéristiques sont beaucoup plus adaptées :
– modèle : GRAUPNER SPEED 720BB Torque
– tension nominale : 14V
– régime à vide : 4500 tours
– induit 8 pôles (et donc beaucoup de couple à bas régime)
– consommation à vide : 700mA
Ajoutez à cela que le rotor est monté sur roulements à billes (d’où le suffixe BB pour "balls bearing" de sa référence), et qu’il est anti-parasité d’origine (capa et self apparemment) et vous aurez une idée de l’engin. De plus, il n’est pas si cher que cela : 35 Euros, ce qui pour un moteur électrique de ce gabarit est loin d’être excessif.
Pour confirmer qu’il s’agit bien du choix optimal, M. LECA m’indique qu’ils utilisent ce modèle pour entraîner en prise directe des hélices de 70 à 90 mm sur leurs modèles de sous-marins.
OK, l’affaire est entendue et je commande deux exemplaires de la bête. Au passage, j’en profite pour commander également deux accouplements d’arbres plus aptes à transmettre les couples en jeu, car les modèles de notre fournisseur initial avaient tendance à patiner dès la montée en régime.
Le week-end suivant
Les moteurs et les accouplements sont arrivés dans la semaine (à peine 48 heures après la commande, et ça aussi c’est un autre point fort de LECMA-RC : les expéditions, ça ne traîne pas)
Pour donner une idée de l’évolution, ci-dessous le moteur actuel à côté de son successeur :

Et pour comparaison également, les deux modèles d’accouplements :

Au passage, on modifie pour la n+1ème fois le propulseur, histoire que les nouveaux moteurs soient un peu plus à l’aise. Je ne compte plus les versions maintenant, et je vous fais grâce du roman-feuilleton, car vous connaissez l’histoire à force.
Voici le résultat des courses :
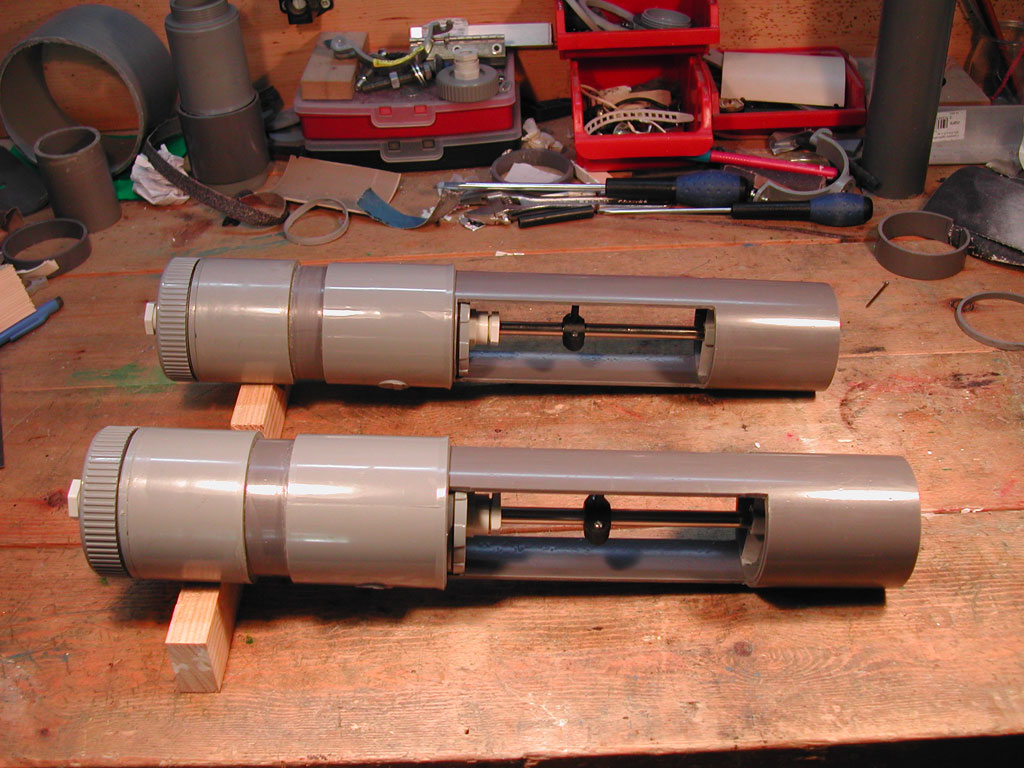
On note que le compartiment moteur à grossi. C’est tant mieux car ça ajoute de la flottabilité si on le garde sec, et ainsi on réduit le poids apparent du propulseur.
En matière d’essais maintenant :
– ça brasse bien
– ça consomme tout juste 3A à pleine charge, soit moins de la moitié des précédents
– certes le moteur est un peu chaud après l’essai, mais on peut y laisser le doigt dessus (et donc il ne dépasse pas les 60°), sachant qu’en plus l’essai à été fait moteur au sec (en effet, je ne suis pas très certain que les roulements à billes apprécieraient de nager dans le liquide de refroidissement)
Le mot de la fin
Je n’ose plus crier victoire, et on verra donc à l’usage... Peut-être ajoutera-t-on une sonde pour surveiller la température du moteur lors des sorties, mais on s’en occupera plus tard.





Vos commentaires
# Le 18 mai 2007 à 17:29, par fred06 En réponse à : Motorisation : suite et fin (du moins je l’espère)
En réponse à : Motorisation : suite et fin (du moins je l’espère)
Merci pour toute cette serie d’articles, c’est passionant (comme toujours sur ce site). Les articles sur ce qui n’a pas fonctionne sont plutot rares, et pourtant c’est une source de connaissances fabuleuse !
Et bravo pour l’inventivite dans la recherche de solutions, je m’incline bien bas devant tant d’esprit.
Decidement ce site est absolument genial : une meilleure illustration de ce qu’est la robotique, je vois pas.
Et continue le style d’ecriture Eric, j’adore 🙂
Bref : merci !
# Le 21 mai 2007 à 20:57, par ? En réponse à : Motorisation : suite et fin (du moins je l’espère)
En réponse à : Motorisation : suite et fin (du moins je l’espère)
Merci beaucoup Fred pour ce message d’encouragements 🙂
Comme tu le dis, documenter les galères m’a paru effectivement intéressant car ça permet à d’autres d’éviter de perdre le temps que j’ai perdu du mon côté. Et même si ce n’est pas pour le même type d’application, ça peut donner des idées dans d’autres contextes.
D’ailleurs, je dois dire que c’est en partie suite à la suggestion de Thomas (un de nos membres) que je me suis obligé à retracer les diverses péripéties (mêmes infructueuses), quitte à passer pour un couillon parfois. Il avait à juste titre suggéré de documenter de manière générale les problèmes rencontrés dans le cadre des divers projets, et surtout la méthode utilisée pour leur investigation et la recherche de solutions.
Répondre à ce message