PoBot
PoBot
Système de capture des balles
On est reparti pour une solution dérivée de celle de 2004 : capture de la balle dans une benne, au moyen d’un rouleau mousse.
Voici le bras oscillant, portant le rouleau et son moteur (un servo modifié, comme d’hab)
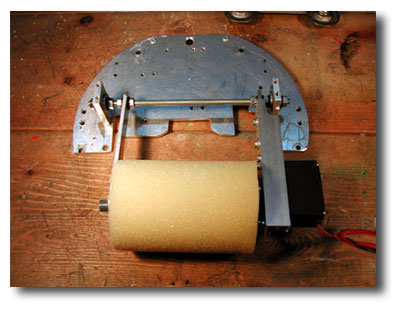
Et l’ensemble monté sur le chassis :
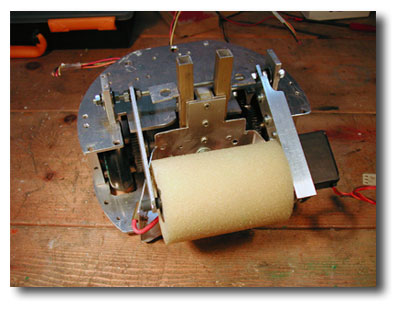
Un gros plan sur la benne nouvelle formule :
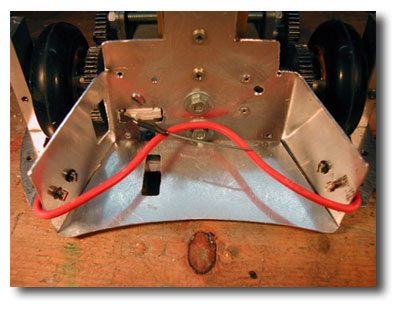
Le guide rouge permet d’amener la balle en position pour être analysée (détection de couleur) et également pour être éjectée délicatement dans un trou à marquer.
Comme d’habitude, le système D règne pour les pièces spéciales :

Petit jeu : devinez d’où provient la pièce qui maintient le guide. Indice : elle est en laiton (désolé pour la mise au point un poil ratée)
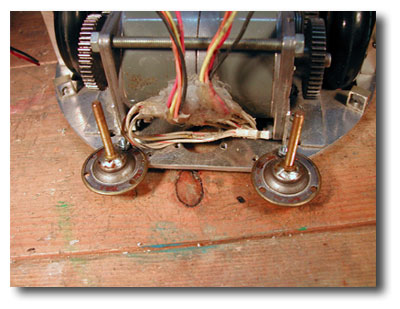
Ball-casters tout terrain
En ball-caster tout seul,ça peut tomber dans un trou, et donc ça tombera dans un trou (en vertu de la sacro-sainte loi de Murphy). Par contre 2 ball-casters judicieusement espacés résolvent la difficulté.