 PoBot
PoBot
Accueil > L’association > En public > Les compétitions de robotique > Coupe de France > Coupe 2006 : Funny Golf
 Coupe 2006 : Funny Golf
Coupe 2006 : Funny Golf
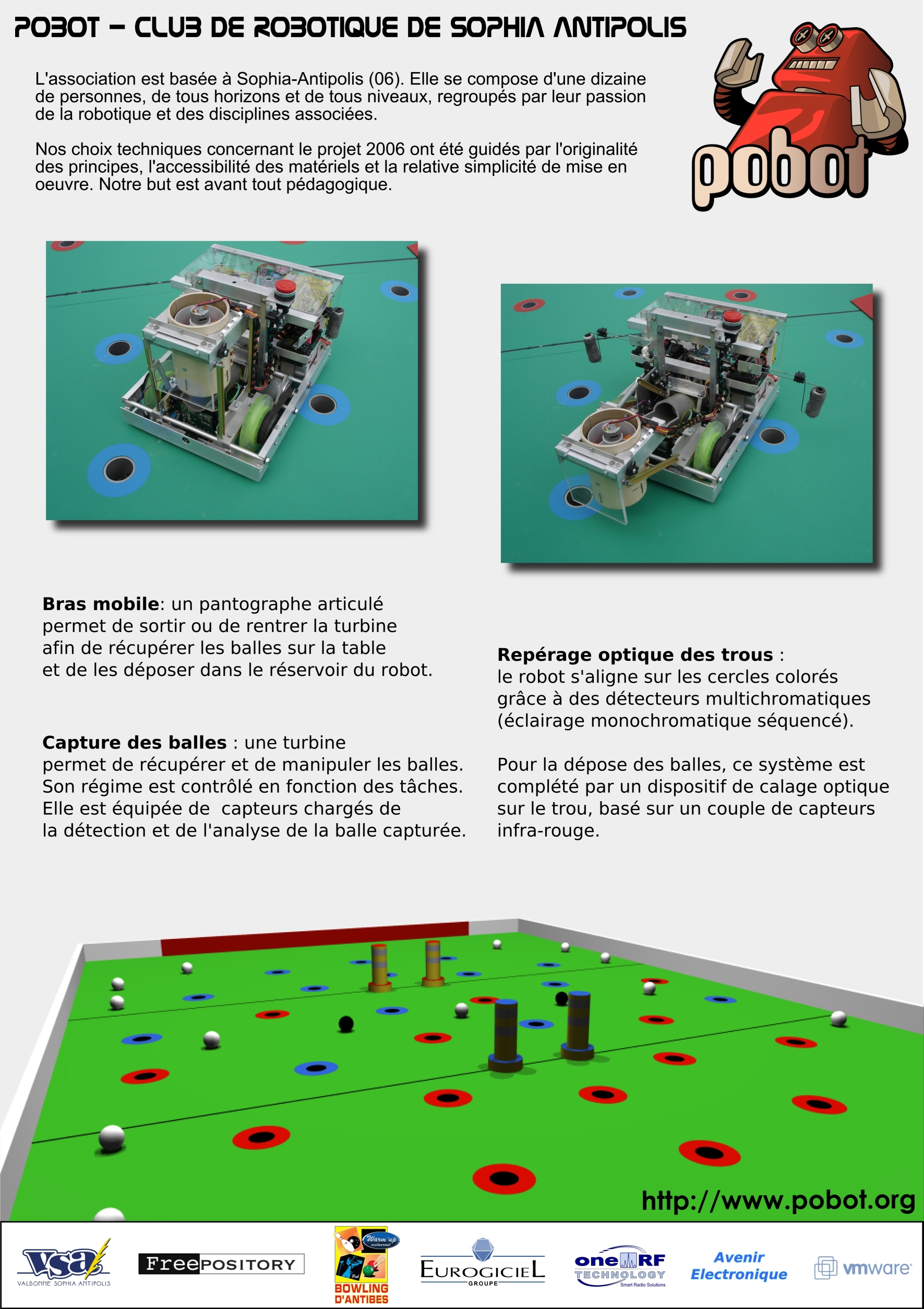
Deux robots sur le green s’affrontent pour remplir leur parcours et vider celui de leur adversaire en 1’30 à l’aide de balles trouvées sur le terrain ou récupérées dans des godets.
Cette édition 2006 de la Coupe Eurobot permettait de mettre en oeuvre des solutions simples, les objets étant communs (balles de ping-pong) mais nécessitait de l’adresse car une fois n’est pas coutume le terrain était percé de trou : il fallait donc pouvoir se déplacer en évitant les trous et être précis dans la dépose des balles.
Nous avons donc fait le choix de la précision et de la fiabilité. Malgré un coût parmi les plus bas de la compétition (600 € pour le robot seulement !), le soin apporté à la réalisation et la prudence dans les déplacements (parfois qualifié de lenteur...) nous ont permis d’atteindre une quatrième place, du jamais vu pour une association de notre taille et un succès mérité pour toute l’équipe.
Poster de l’équipe présentant le robot :
Articles
-
 Le robot de la Coupe 2006
Le robot de la Coupe 2006
1er septembre 2006, par Julien H. -
 Prototypes de robots 2006
Prototypes de robots 2006
20 octobre 2005, par Eric P., Julien H., Patrick -
Modélisation du terrain
8 octobre 2005, par Julien H. -
Règlements Officiels
24 septembre 2005




