 PoBot
PoBot
 Prototypes de robots 2006
Prototypes de robots 2006Premier proto : aspirer les balles
Le prototype réalisé par Eric permet d’aspirer des balles, ce qui a un double avantage :
– limiter la mécanique
– avoir un rayon d’action très grand
Ce prototype est réalisé en Lego Mindstorms, il est motorisé, commandé et un capteur de lumière IR permet de repérer les trous (le point rouge sur la vidéo). Voici ce que ça donne :
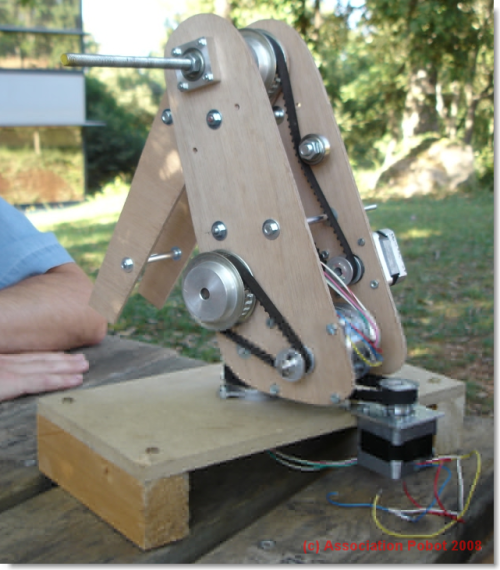
Deuxième proto : un bras articulé
Patrick a utilisé des moteurs pas à pas pour réaliser un prototype de bras. L’avantage du bras est d’exploiter les dimensions autorisées par le règlement et d’atteindre des objets lointains. On peut y adapter tout type de système : pince, aspiration, etc..
C’est également réutilisable chaque année quelque soit l’objet à manipuler. Voici ce que ça donne :

Conclusion : le modèle retenu et le résultat obtenu
Sur le robot Gobeur (4ème de la Coupe de France), nous avons mixé ces deux prototypes : un pantographe permet de se déployer au-delà des dimensions du chassis ("bras") et une turbine va attirer les balles de ping-pong et permettre une manipulation facile et peu mécanisée des balles.
Bravo à Eric et Patrick pour ces prototypes qui ont permis d’avoir un robot performant qui réutilise le meilleur des solutions imaginées.





Vos commentaires
# Le 26 avril 2008 à 19:15, par DADDA Mustapha En réponse à : Prototypes
En réponse à : Prototypes
Bon jour,
Je suit en tain de réaliser un bras manipulateur, J’aimerai bien savoir comment prosséder pour calculer les couples des moteurs nécessaire,
et le sens du mot contrepoids.
Et si c’est possible les détailles de la partie mécanique de votre prototype "la longeur de l’avant bras, le bras, ..."
Merci.
# Le 27 avril 2008 à 07:32, par Julien H. En réponse à : Prototypes
En réponse à : Prototypes
Bonjour,
Le couple s’exprime soit en Newton.m, soit en kg.m ou kg.cm. Cette dernière unité est plus facile à utiliser pour le calcul du couple : 1 kg.cm correspond à un coupe capable de faire bouger une masse d’1kg si tu la suspens au bout d’un bras d’1 cm de longueur (1 poids à l’extrémité, l’axe du moteur à l’autre). Par exemple si ton bras fait 20 cm et le poids 500 grammes, il te faudra un couple de 20x500 = 10 kg.cm.
Ce couple étant important (imaginez un pack de 6 bouteilles d’eau) suspendu sur votre moteur, on utilise un contrepoids : une masse identique suspendu à l’autre extrémité de l’axe de rotation, le moteur n’étant plus à une extrémité mais au centre pondéré de l’axe. Dans notre exemple, un contrepoids de 5 kg situé à 2 cm de l’axe de rotation permet de maintenir un équilibre qui soulage le moteur et lui permet de n’utiliser qu’un couple réduit, pour la rotation de l’ensemble en équilibre.
A vérifier et croiser avec d’autres avis, par exemple sur le forum robotik : http://planete-sciences.org/forums/
# Le 15 janvier 2013 à 15:54, par Presci_Kh En réponse à : Prototypes
En réponse à : Prototypes
Bonjour,
J’aimerais savoir quel bois avez-vous utilisé pour votre robot ?
# Le 15 janvier 2013 à 16:42, par Julien H. En réponse à : Prototypes
En réponse à : Prototypes
Il me semble que c’était du medium de récupération.
# Le 15 janvier 2013 à 17:00, par Eric P. En réponse à : Prototypes
En réponse à : Prototypes
Les flancs des bras sont en contre-plaqué.
Le socle c’est du tout venant (medium ou agglo).
# Le 16 janvier 2013 à 08:41, par Presci_Kh En réponse à : Prototypes
En réponse à : Prototypes
Merci pour votre réponse !
Mais pensez vous qu’un bras articulé d’assez petite dimension pourrait le faire en balsa ?
# Le 16 janvier 2013 à 21:52, par Eric P. En réponse à : Prototypes
En réponse à : Prototypes
Le balsa a une résistance mécanique très faible. Utilisé seul je ne suis pas certain qu’il résiste ne serait-ce qu’à la charge que représentent les servos.
Il est par contre toujours possible de le consolider par des baguettes de peuplier par exemple, ou autre matériau du genre. Mais ça complique la construction.
Tant qu’à faire, si le but recherché est de réduire la taille, et de ce fait l’épaisseur, j’opterais pour du contre-plaqué aviation disponible en tant que fourniture d’aéro-modélisme : il est disponible dans des épaisseurs très fines tout en étant résistant grâce à l’utilisation de beaucoup plus de plis que le contre-plaqué ordinaire.
Une autre option (utilisée dans le cadre de la construction du radeau environnemental, documentée dans une autre rubrique de ce site) : la récupération de morceaux d’ABS ou équivalent à partir de plinthes et goulottes électriques. Le matériau est léger, fin, facile à travailler, et facile à assembler par collage.
A la limite, j’orienterais plutôt votre tentative dans cette direction, car malheureusement les magasins de modélismes se font de plus en plus rares, et encore plus rares ceux qui proposent autre chose que du prêt à rouler, naviguer ou voler, et donc des matériaux de construction comme le CTP aviation. Et quant à le faire venir par la poste, c’est risqué et donc cher.
# Le 21 février 2013 à 21:27, par karim En réponse à : Prototypes
En réponse à : Prototypes
quelle est le type de moteur utilisé et merci
Répondre à ce message