 PoBot
PoBot
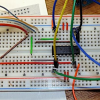
Avec un seul circuit de type pont en H (L293 ou SN754410), on peut contrôler deux moteurs à courant continu ou un seul moteur pas à pas à deux phases. C’est ce que nous avons fait lors de nos ateliers hebdomadaires et que nous vous présentons ici.
Le but de cet article est de reproduire rapidement une expérience simple : faire tourner un moteur électrique à courant continu ou un moteur pas-à-pas (tels que ceux qu’on récupère dans des imprimantes) avec un composant simple et peu cher. Bien (…)
Accueil > Mots-clés > Mécanique > pas-à-pas
pas-à-pas
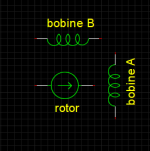
Les moteurs pas-à-pas (ou "stepper motors" en anglais) utilisés en robotique mobile ludique sont des moteurs sans balais dans lesquels un rotor (aimant permanent) et un stator (bobinage) présentent une alternance de pôles magnétiques permettant un contrôle précis de l’avancement du moteur (passer d’une position à une autre en changeant la polarité du bobinage : c’est le pas).
Articles
-
 Contrôleur "pont en H" pour moteurs électriques
Contrôleur "pont en H" pour moteurs électriques
14 décembre 2009, par Julien H. -
 Moteur pas-à-pas piloté par GPIO du Raspberry Pi
Moteur pas-à-pas piloté par GPIO du Raspberry Pi
24 février 2013, par Frédéric R.Je sais à présent piloter un moteur pas à pas depuis mon Raspberry pi directement (en utilisant les ports GPIO).
Pour ceux qui seraient intéressés, voici comment j’ai procédé Théorie sur les moteurs pas à pas Piloter un moteur pas à pas (via un CI L293D) avec une Arduino Programme Arduino Théorie du GPIO de la Raspberry Pi Assemblage de LEDs pilotées par la Raspberry Allumer 4 LEDs avec un script en Python Utilisation de la bibliothèque WiringPi en C Programmation du pilote en C (…) -
 Le dSPIN de ST-Micro : mesurer les caractéristiques du moteur
Le dSPIN de ST-Micro : mesurer les caractéristiques du moteur
19 août 2012, par Eric P.Cet article fait suite à celui qui présente le chip. Il détaille les procédures permettant de mesurer des caractéristiques du moteur à piloter, de manière à optimiser les paramètres de fonctionnement du dSPIN.
-
 Moteur pas-à-pas piloté par un shield L293
Moteur pas-à-pas piloté par un shield L293
27 décembre 2012, par Julien H.Les contrôleurs de moteur pas-à-pas comme le L293 reproduisent avec une tension d’alimentation spécifique (plus élevée, avec un courant disponible plus important) les consignes transmises depuis un contrôleur avec une tension plus faible (3.3 volts ou 5 volts et surtout un courant faible).
La difficulté présentée ici provient de l’électronique ajoutée dans la conception des cartes d’extension qui facilitent la connexion. Pour éviter d’avoir à gérer 6 signaux (deux "Enable" qui activent ou (…) -
Choix d’un moteur pas-à-pas
27 août 2010, par Julien H., StephanCet article retrace les échanges que nous avons eu régulièrement en interne. En effet, même quand on connait bien les moteurs électriques, le choix n’est pas toujours évident et fait intervenir de nombreux critères.
En espérant que cette présentation vous soit utile, n’hésitez pas à nous faire part de votre propre expérience.
Quand vient l’heure du choix
Avant de déterminer le bon moteur pas-à-pas, il a fallu prendre la décision d’utiliser cette technologie. Il y a divers inconvénients (…) -
 Une éolienne à vitesse constante (2012)
Une éolienne à vitesse constante (2012)
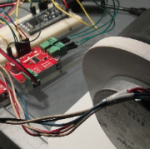
9 septembre 2012, par Jean-PierreLa construction d’une structure mobile comme une éolienne n’est pas tellement éloignée de celle d’un robot mobile. Elle est intéressante d’un point de vue mécanique et électronique.
Le modèle choisi pour cet "EoleBot" est une éolienne à axe vertical avec un mécanisme ingénieux permettant une vitesse constante et donc une protection contre les vents forts. Les explications et les consignes de fabrication sont disponibles sur le site On peut le faire.
Principe
Mais pourquoi une vitesse (…) -
 Moteurs pas-à-pas : comprendre les enchainements
Moteurs pas-à-pas : comprendre les enchainements
27 décembre 2012, par Julien H.Les moteurs les plus courants dans notre club sont les moteurs pas-à-pas... pourquoi ? à la fois parce que les modèles neufs sont peu onéreux, parce que les modèles de récupération se trouvent dans les imprimantes qu’on trouve par dizaines dans les poubelles, et parce qu’ils couvrent à peu près toute la gamme de taille et de puissance dont on a besoin.
Mais leur mode de contrôle est particulier. S’il a l’avantage de permettre un asservissement en position sans électronique et sans capteurs (…) -
 Benchmark du dSpin pour R2-D2
Benchmark du dSpin pour R2-D2
19 août 2012, par Julien H.Nous allons utiliser des drivers dSPIN avec la puce L6470 de ST Microelectronics. Ils ont été présentés par Éric dans cet article.
Plutôt gros le moteur, non ? C’est un Step-Syn 03-820-26 de SANYO qui fait 85 mm de diamètre.
Cet article décrit comment adapter les paramètres électriques aux caractéristiques des moteurs, et ensuite à régler les paramètres d’accélération et de vitesse à la structure mécanique de R2-D2, notamment les effets de son poids et de son centre de gravité.
La (…)
