 PoBot
PoBot
 Moteurs pas-à-pas : comprendre les enchainements
Moteurs pas-à-pas : comprendre les enchainementsLes moteurs les plus courants dans notre club sont les moteurs pas-à-pas... pourquoi ? à la fois parce que les modèles neufs sont peu onéreux, parce que les modèles de récupération se trouvent dans les imprimantes qu’on trouve par dizaines dans les poubelles, et parce qu’ils couvrent à peu près toute la gamme de taille et de puissance dont on a besoin.
Mais leur mode de contrôle est particulier. S’il a l’avantage de permettre un asservissement en position sans électronique et sans capteurs supplémentaires, il faut bien comprendre son fonctionnement.
Deux bobines
Dans cet article, nous allons voir le cas du moteur bipolaire à deux phases, c’est le moteur à 4 fils que l’on trouve assez facilement. Si vous avez un moteur à 6 ou 8 fils, rien de perdu car on peut mettre de côté 2 fils ou les apparier pour avoir toujours deux bobines à commander (et comme le boudin, une bobine a deux extrémités ce qui fait bien 4 fils). Pour les pas-à-pas à 5 fils, c’est de l’unipolaire et la commande est encore plus simple : une fois trouvé le commun, alimentez successivement chacun des fils avec un montage à base de transistors.
Représentation sommaire
Tout d’abord, sachez que s’il n’y a que deux bobines (deux phases), l’enroulement intérieur de la cage (stator) et de l’axe (rotor) est une ingénieuse succession de bobinages en fil de cuivre qui permettent d’avoir une multitude de pas (24, 72, 200, 400, ...). Mais au final, il n’y a que quatre positions magnétiques différentes de base, les pas, où l’attirance d’un pôle du rotor (nord ou sud) à un pôle du stator (sud ou nord) est maximum.
Deux pôles, deux éléments, quatre possibilités... mais vous avez peut-être entendu parler des multi-pas : il s’agit de trouver des positions intermédiaires, sans équilibre magnétique (la position est perdue une fois la bobine non alimentée par un courant de maintien). On peut en trouver 4 au milieu de chaque pas (les demi-pas), ou 8 ou 16, etc.. selon la précision du contrôleur de moteur. Comme on ne dispose que de 4 fils, les positions au-delà du quart de pas sont obtenues en faisant varier l’intensité du courant dans chacune des bobines selon deux sinusoïdes.
Donc après cette digression, simplifions les choses en adaptant pour ces moteurs une représentation où les bobines sont à 90° l’une de l’autre.
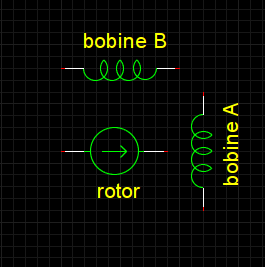
Trouver les pas
Personnellement je n’aime pas cette représentation où l’on dessine une bobine en haut et une à côté, on ne voit plus très bien ce que fait le rotor attiré par un seul côté. C’est encore pire quand on essaye de montrer les fils de connexion à chaque extrémité de la bobine : ça se croise et on perd la vision du changement de polarité. Ce n’est qu’un avis perso : vous faites comme vous voulez tant que vous comprenez... et que vous savez l’expliquer à quelqu’un d’autre !
Donc je vous propose de tracer les pas de manière scolaire, avec un repère où l’axe des abscisses indique le signe du courant dans la bobine A et l’axe des ordonnées indique le signe du courant dans la bobine B.
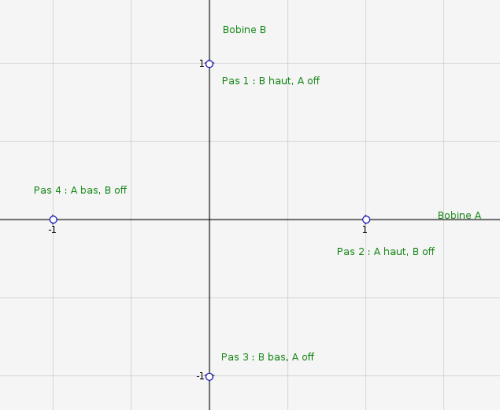
Chaque axe peut alors prendre trois valeurs :
- 1 si la bobine est sous tension avec un courant dans un sens
- 0 si la bobine n’est pas sous tension
- -1 si la bobine est sous tension avec un courant dans l’autre sens
En termes de fils de câblage, c’est assez simple mais ça peut varier selon votre contrôleur. Le 0 est obtenu à équipotentiel (la masse pour faire simple), tandis que le 1 et le -1 sont obtenus en inversant les potentiels sur chacun des deux pôles, soit 0 / Vss ou Vss / 0 pour la plupart des circuits utilisant une tension d’alimentation des moteurs positive.
Petit exercice
Il ne vous reste plus qu’à prendre votre logiciel de géométrie préféré (ici, c’est CarMetal sous Linux Ubuntu que j’ai utilisé) pour tracer les différents demi-pas et quart-de-pas avec la même méthode.
Envoyez-moi vos clichés pour que je les publie.




