 PoBot
PoBot
 Le Pendobot (2012)
Le Pendobot (2012)Un tout nouveau robot entièrement conçu au club, tant pour sa structure mécanique que pour sa carte de contrôle : le Pendobot est un robot à équilibrage dynamique.

Ses deux roues soutiennent la structure en pendule inversé. Il n’y a donc pas de troisième point d’appui (habituellement constitué d’une roue folle ou d’un patin) ce qui fait que le robot est en équilibre instable.
Histoire
L’intérêt pour les pendules inversés a déjà plusieurs années, lorsque les premiers robots Lego Mindstorms NXT ont été assemblés sous cette forme (voir nos prototoypes) et que les premières informations techniques concernant le véhicule Segway ont été disponibles.
La structure mécanique a été assemblée à l’automne 2011, les cartes électroniques ont été ajoutées au printemps 2012 et le robot a été baptisé "Pendobot" en mai 2012.
Mécanique
Le châssis a été astucieusement conçu pour permettre d’embarquer toutes les pièces vitales (moteurs, batteries, électronique) dans le cylindre formé par les roues du robot. De fait, celles-ci sont de grand diamètre (20 centimètres) et rien ne dépasse pour le châssis principal.
Deux avantages :
– pas de casse des éléments principaux lorsque le robot tombe
– possibilité de tourner à 360° pour le châssis
Donc de premier abord, ce pendule inversé n’en est pas nécessairement un, puisqu’il n’y a pas de flèche en hauteur qui tomberait d’un côté ou de l’autre. Des extensions seront ajoutées lorsque les algorithmes de maintien de l’équilibre auront été développés.
Comme aucun de nous ne dispose de l’espace nécessaire (plusieurs mètres de long) pour développer une plate-forme stabilisée d’un mètre de haut, il est très pratique de pouvoir étudier les déplacements sans le besoin de constamment redresser le robot et sans risque d’abimer quoi que ce soit.
Les matériaux utilisés permettent une structure robuste, et le Pendobot est vraiment tout terrain :

Les roues sont en PVC expansé dur, usiné à la fraiseuse. Elles sont fixées sur des moteurs de récupération (distributeur de friandises).
Le châssis en forme de U est en ACP, un panneau sandwich à parement aluminium, de type Alucobond : c’est une chute des grands panneaux d’enseignes publicitaires que nous récupérons à volonté. Le fraisage est particulier à cause de la couche interne de plastique PE mais les pièces sont très rigides du fait des deux fines couches en aluminium extérieures (0,5 mm pour une épaisseur totale de 3 mm).
Électronique de puissance
Afin de tester l’équilibre du robot, une commande différentielle a été conçue pour pouvoir contrôler les moteurs avec seulement deux signaux : la vitesse moyenne et l’angle de rotation (le biais).
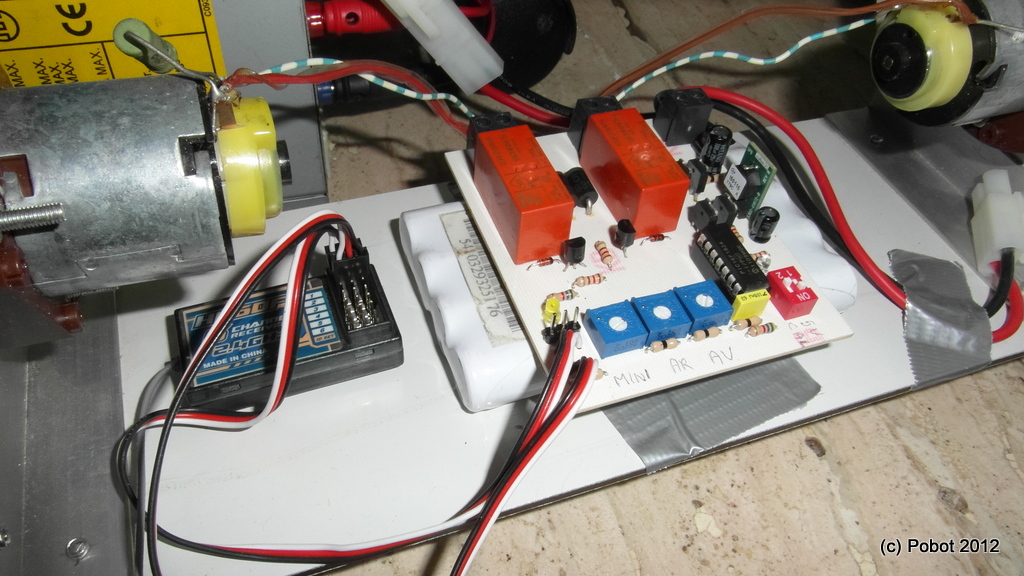
Les deux signaux pris en entrée par le micro-contrôleur Microchip PIC sont ceux de servomoteurs, ce qui permet d’utiliser une radio-commande pour faire des tests d’équilibrage lors de la fixation des cartes et surtout des batteries (plus lourdes).
Ces deux signaux sont facilement générés par une carte programmable : nous utiliserons l’Arduino dans un premier temps pour sa facilité de prototypage rapide et de tests d’algorithmes mathématiques.
Le micro-contrôleur PIC contrôle des relais sur lesquels sont connectés les moteurs à courant continu du robot. Il n’y a pas besoin de pont en H et le changement de direction est contrôlé par un changement de vitesse relative entre les signaux PWM qui règlent l’ouverture du relais du moteur gauche et du relais du moteur droit.
Électronique logique et capteurs
En plus de la carte programmable Arduino utilisée pour les premiers tests, d’autres cartes se chargeront de fournir les informations de vitesse et d’inclinaison du robot : la centrale inertielle sera constituée de capteurs gyroscopiques et d’accéléromètres, en attendant de voir si d’autres seront nécessaires.
Le premier gyroscope utilisé est le Wii Motion Plus, l’extension de la manette pour console de jeu Nintendo Wii, que nous avions déjà testée avec succès lors de sa sortie. Elle se connecte en I2C directement sur une Arduino, puis plus tard sur une carte secondaire plus rapide si les calculs mathématiques le nécessitent.
Une fois l’équilibre atteint, d’autres capteurs peuvent être ajoutés : détection d’obstacles, GPS, etc...
Disponibilité
Le robot est disponible pour tous les adhérents du club participant à nos ateliers hebdomadaires : de nouveaux algorithmes de pilotage peuvent être développés et de nouveaux capteurs peuvent être testés.





Vos commentaires
# Le 2 août 2012 à 21:09, par Esprit En réponse à : Le Pendobot (2012)
En réponse à : Le Pendobot (2012)
Je ne vois pas de codeurs sur les moteurs. Or, pour asservir ce petit robot pour qu’il tienne l’équilibre, c’est indispensable, non ?
Vous allez en rajouter par la suite ? C’est sans doute un peu plus cher mais n’est-ce pas plus simple d’acheter des ensembles moto-réducteurs avec codeur ?
# Le 2 août 2012 à 21:49, par Julien H. En réponse à : Le Pendobot (2012)
En réponse à : Le Pendobot (2012)
Pas nécessaire, on a un gyroscope Wii Motion Plus dessus. Mais ça me fait penser qu’il faut que j’actualise les photos avec le nouveau boîtier.
Rien n’a été acheté, tout a été récupéré ou fabriqué avec nos outils (les roues par exemple).
# Le 3 août 2012 à 19:15, par Esprit En réponse à : Le Pendobot (2012)
En réponse à : Le Pendobot (2012)
Et le gyroscope permet de faire tout l’asservissement ? Il n’est pas nécessaire d’avoir un retour de vitesse sur les roues ? Je pensais que le gyroscope permettait d’avoir l’angle et qu’il fallait ensuite les moteurs munis de codeurs pour asservir convenablement.
# Le 4 août 2012 à 12:41, par Julien H. En réponse à : Le Pendobot (2012)
En réponse à : Le Pendobot (2012)
Tout dépend ce qu’on entend par "convenablement". C’est pas un Segway, c’est juste Pendobot !
Il suffit souvent d’étalonner les consignes de vitesses par des tests successifs en fonction de l’angle de chute du pendule, puis de "laisser faire la nature", plutôt que de se lancer dans des formules complexes faisant intervenir la vitesse mesurée par les codeurs.
Si on commençait à faire selon la théorie, on jetterait le Pendobot et on ne s’amuserait plus :)
Répondre à ce message