 PoBot
PoBot
 La sphère volante de Fumiyuki Satō
La sphère volante de Fumiyuki SatōCréée fin 2010, la sphère volante développée par l’institut technique de R&D du ministère de la défense japonais est rapidement devenue une attraction sur le web et la source de beaucoup de questions pour tous ceux qui ont déjà essayé de faire fonctionner un hélicoptère en modèle réduit.

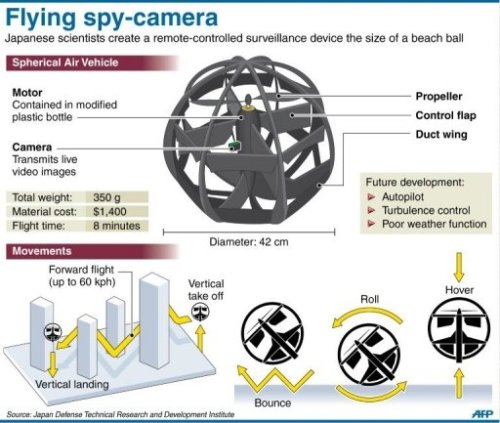
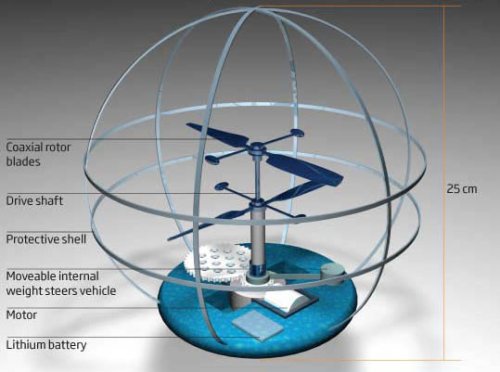
Son inventeur, Fumiyuki Sato, a assemblé une seule hélice propulsante et des volets directionnels dans une sphère de 42 centimètres. Le modèle fonctionne en intérieur comme en extérieur, mais se pilote par radio-commande exclusivement. Elle a une autonomie de 8 minutes.
La nouveauté de cette sphère sur tous ses prédecesseurs à vol stationnaire (UFO, quadrirotors) est son agilité et la lenteur de ses déplacements : avec une caméra et un pilote adroit, c’est un bon engin de reconnaissance. Elle trace la voie d’une nouvelle génération de robots : mécanisme simple et astucieux, mais logiciel pointu pour contrôler en temps réel un nombre de paramètres de plus en plus élevés.
Principe de fonctionnement
L’hélice est placée verticalement, bien que la sphère s’incline pour les vols les plus rapides (60 km/h annoncés).
Il y a trois types de volets :
– quatre volets verticaux au milieu de la sphère
– quatre volets verticaux en bas de la sphére
– des rideaux flottants tout autour du milieu de la sphère
Les deux premières séries sont décalées de 45°. Le rôle des rideaux flottants n’est pas encore élucidé.
Trois gyroscopes sont mentionnés, et certaines démonstrations publiques montrent que la sphère résiste à une poussée (sans aller jusqu’au fameux test de Big Dog, aussi appelé très techniquement "le coup de latte").
Vidéo des vols
En juillet 2011, l’agence Reuters a publié un article sur une démonstration. La vidéo a fait rapidement le tour des sites ludiques, sans qu’il n’y ait finalement beaucoup d’explications données sur les principes de conception.
Nos adhérents peuvent consulter en réunion une vidéo du ministère de la défense montrant les premiers vols du prototype.
Un prédécesseur en 2009
Le robot sauteur d’Eric Beyer et Mark Costello de l’université du Colorado est sans comparaison quant au résultat atteint, mais démontre une première étude de faisabilité pour stabiliser une sphère et lui faire franchir un obstacle.





Vos commentaires
# Le 30 août 2012 à 20:10, par J.D. Nicoud En réponse à : La sphère volante de Fumiyuki Satō
En réponse à : La sphère volante de Fumiyuki Satō
Le LIS à l’EPFL travaille depuis plusieurs années sur des engins volant originaux. Le AirBurr a été conçu pour accepté les chocs sur les parois, la chute dans une position quelconque et un redécollage dans les 20 secondes grâce à un mécanisme astucieux.
Répondre à ce message