 PoBot
PoBot
 Introduction
IntroductionComme décrit dans l’article précédent, nous avons redonné vie à Youpi à l’aide de technologies modernes couplées à la mécanique et à l’électronique d’origine.
Cela a donné certes une démonstration opérationnelle, mais basée sur un dispositif assez complexe à mettre en oeuvre, puisque tributaire de deux cartes externes (une Arduino et une Raspberry) connectées au bras.
Nous avons donc mis en chantier une refonte totale de Youpi, afin d’offrir une base intégrée et ouverte, propice à la création de nouvelles démonstrations venant enrichir l’existant, le tout sous forme d’un matériel unique pouvant être utilisé sans nécessité de périphériques supplémentaires.
Par ailleurs, notre Youpi a commencé à donner des signes de fatigue en fin du WE des Sciences 2015, auquel le fort échauffement des moteurs et de l’électronique ne sont probablement pas étrangers. Sans parler du gaspillage d’énergie que peut représenter toute cette dissipation en pure perte de calories.
L’électronique d’origine a donc été totalement remplacée par des technologies actuelles, pour profiter des contrôleurs de moteurs pas à pas performants disponibles sur le marché. La Raspberry externe a été intégrée dans le boîtier socle. Quant à l’Arduino... elle a disparu, les fonctions qu’elle assurait (et bien d’autres) étant maintenant prises en charge par les nouveaux drivers des moteurs.
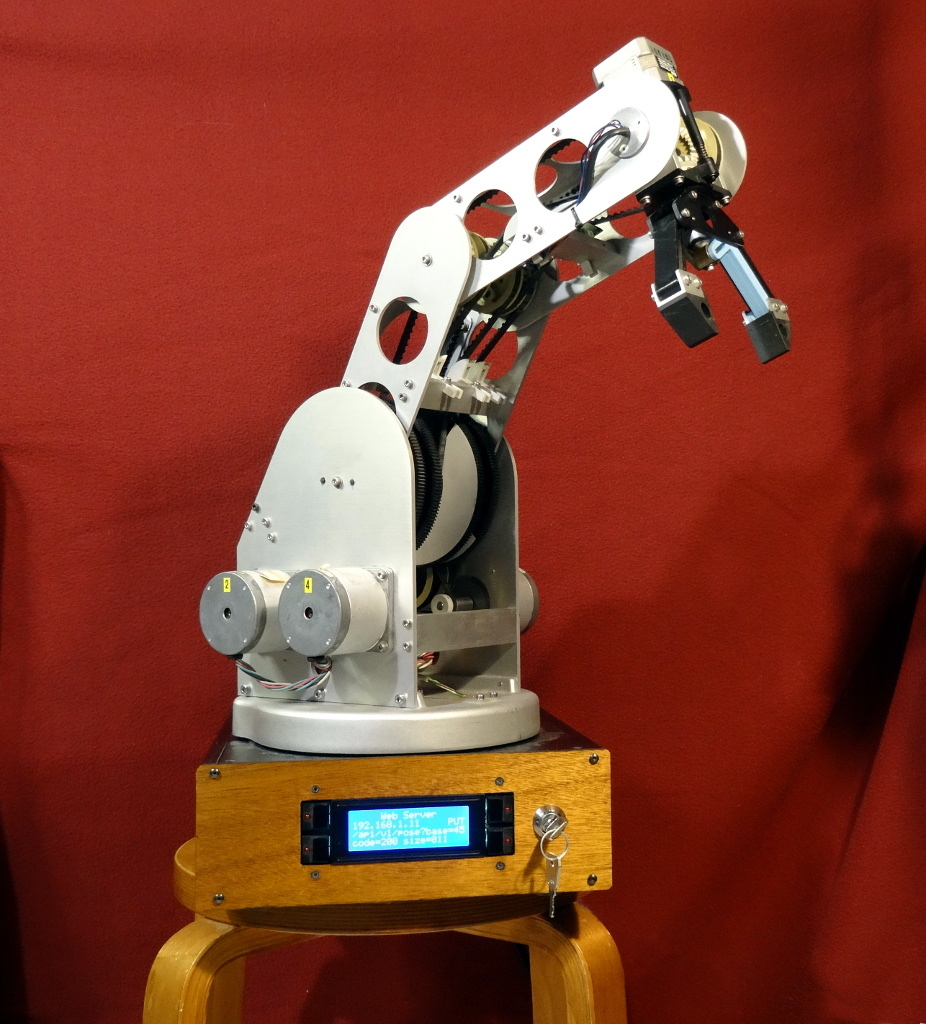
Afin d’être utilisé sans nécessiter de se connecter dessus au travers d’un réseau, Youpi a également été doté d’un panneau de contrôle servant d’interface utilisateur pour accéder aux diverses fonctions et démonstrations embarquées.
Et ça a donné ceci :

Avant
| 
Après
|
Cette rubrique présente les différents travaux réalisés, tant sur le plan électronique que logiciel. Elle est amené à grossir au fur et à mesure de l’adjonction de nouvelles possibilités.
Tous les codes source des logiciels qui ont été développés sont disponibles sur GitHub (https://github.com/pobot-pybot).
Et pour mettre l’eau à la bouche, une petite vidéo de Youpi 2.0 en action :
Premiers pas de Youpi2 from Association Pobot on Vimeo.





Vos commentaires
# Le 19 mai 2022 à 12:28, par Al En réponse à : Introduction
En réponse à : Introduction
Bonjour,
je serai intéressé pour réaliser l interface pour le robot youpi , serait il possible d avoir les plans de cette interface ainsi que le programme ?
# Le 26 octobre 2023 à 23:38, par Eric P. En réponse à : Introduction
En réponse à : Introduction
De quelle interface parlez-vous exactement ?
On arrive à trouver sur le Web pas mal d’infos sur Youpi via une simple recherche Google. C’est comme cela que nous avions réussi à réaliser la première version de l’interfaçage, utilisant toujours l’électronique d’origine et les signaux scabreux sur la DB25.
Répondre à ce message