 PoBot
PoBot
 La carte principale
La carte principaleCette carte assure la supervision du radeau. Comme d’écrit précédemment, elle est architecturée autour d’un module basé sur un ATmega128.
Le schéma électronique est relativement simple et est donné en document joint.
Il intègre principalement :
– la section alimentation
Elle est à base de régulateur linéaire pour le moment. Si cela s’avère utile, et si l’occasion se présente, ils pourront être remplacés par des DC/DC afin d’avoir un meilleur rendement énergétique de l’ensemble
– l’interface avec le bus I2C des capteurs de fond
Vu la longueur du câble impliqué (les capteurs doivent pouvoir être envoyés à une profondeur de 10 mètres - pour commencer), il était nécessaire d’ajouter un bus extender pour fiabiliser les communications. Il s’agit d’un circuit Philips P82B715.
– l’interface avec les différents variateurs
Pour éviter tout problème de pollution par les parasites générés par les moteurs, la liaison avec les variateurs (ESC) est isolée galvaniquement au moyen d’opto-coupleurs.
– les contrôles de tension des batteries
Leur particularité est d’utiliser ici également l’isolation galvanique pour la batterie des moteurs. Elle est réalisée au moyen d’un opto-coupleur analogique AVAGO HCNR200 associé à un ampli-op pour le conditionnement du signal. Ainsi, aucune liaison électrique entre les circuits de puissance et les circuits logiques n’existe, pas même par la masse.
Une fois fini, ça ressemblera à ceci :
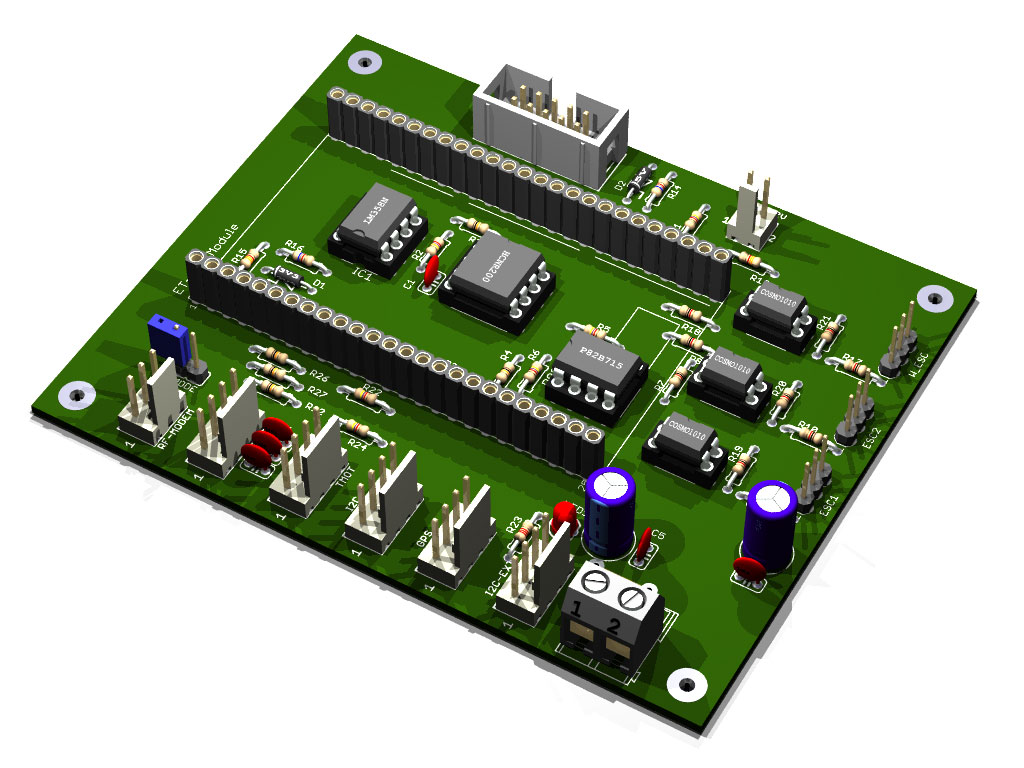
le module ET-AVR Stamp venant s’enficher sur les deux connecteurs parallèles.
Actuallement, tout cela fonctionne déjà sous forme de montage expérimental :
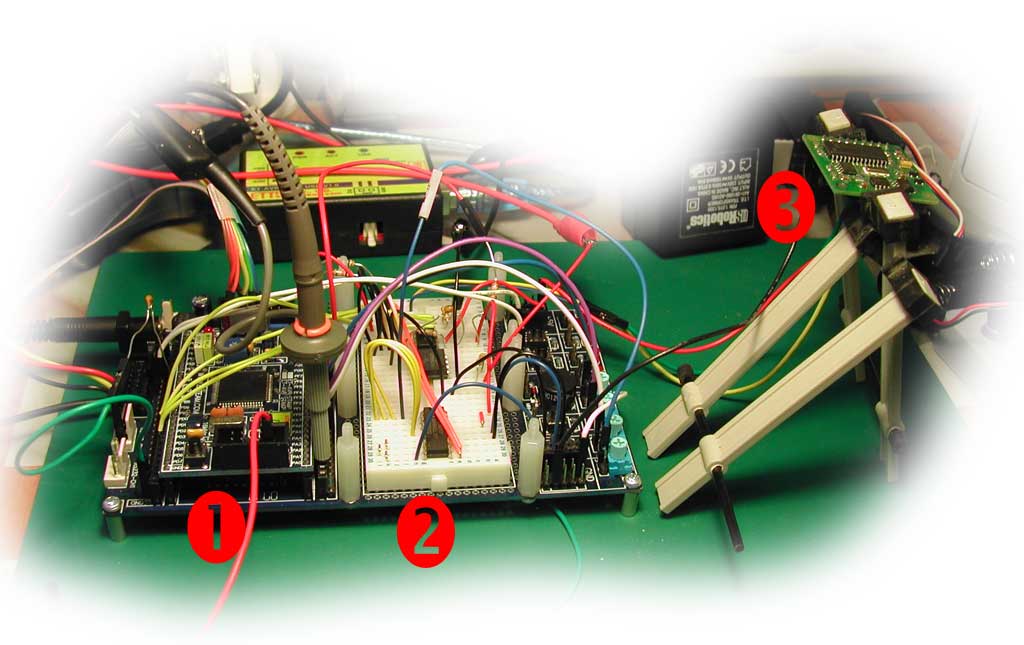
Si, si, ça marche...
|
La preuve
|
Sur le fouillis expérimental, on peut distinguer :
- le module ET-AVR Stamp
- un sous-système sous forme expérimentale incluant :
– le convertisseur A/D I2C (Philips PCF8591) qui va équiper la sonde de fond,
– les deux capteurs de température des moteurs de propulsion
– l’interface optique pour la surveillance de la batterie moteurs - le compas numérique
La preuve que ça marche est que la copie d’écran du logiciel de contrôle a été faite avec tout ceci connecté dessus.




