PoBot
PoBot
 DonkeyBot
DonkeyBotLa description du robot mulet [1] figure dans le règlement pour ce qui est de ses dimensions et de son comportement, mais afin de vous en donner un aperçu le plus précis possible, vous trouverez ici quelques photos et informations collectées pendant sa construction.
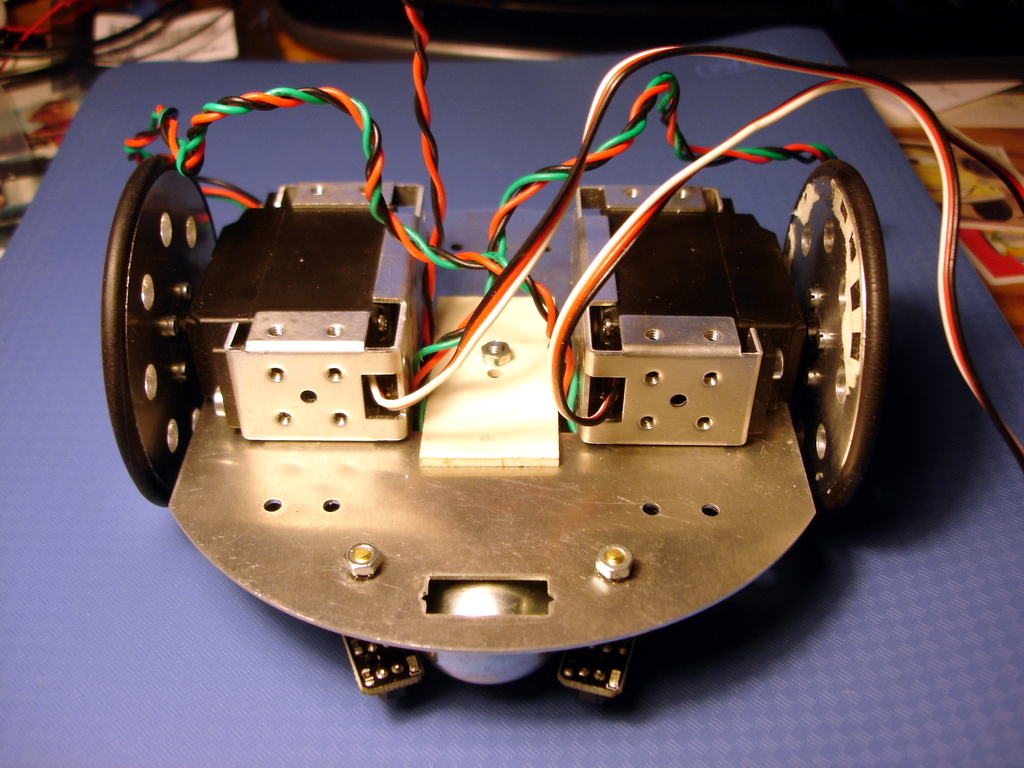
Structure
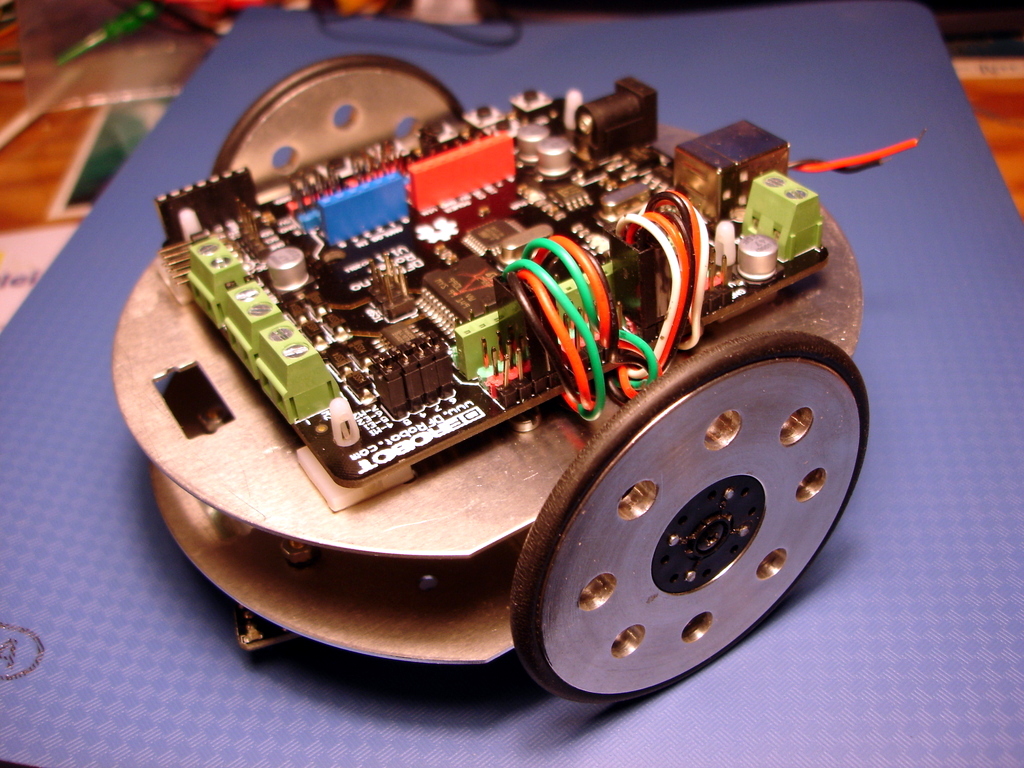
Il est constitué d’un châssis aluminium, propulsé par deux moteurs et contrôlé par une carte DFRduino [2] Romeo.
Pour en savoir plus sur cette carte, allez faire un tour de notre part sur le site de notre ami Laurent. Sachez qu’elle intègre un micro-contrôleur bien entendu, mais également un étage de puissance permettant de piloter des petits moteurs sans carte additionnelle.
Le châssis quant à lui est disponible auprès de la société Easy Robotics. N’hésitez pas à leur rendre visite de notre part également.
En termes de capteurs, il est équipé de :
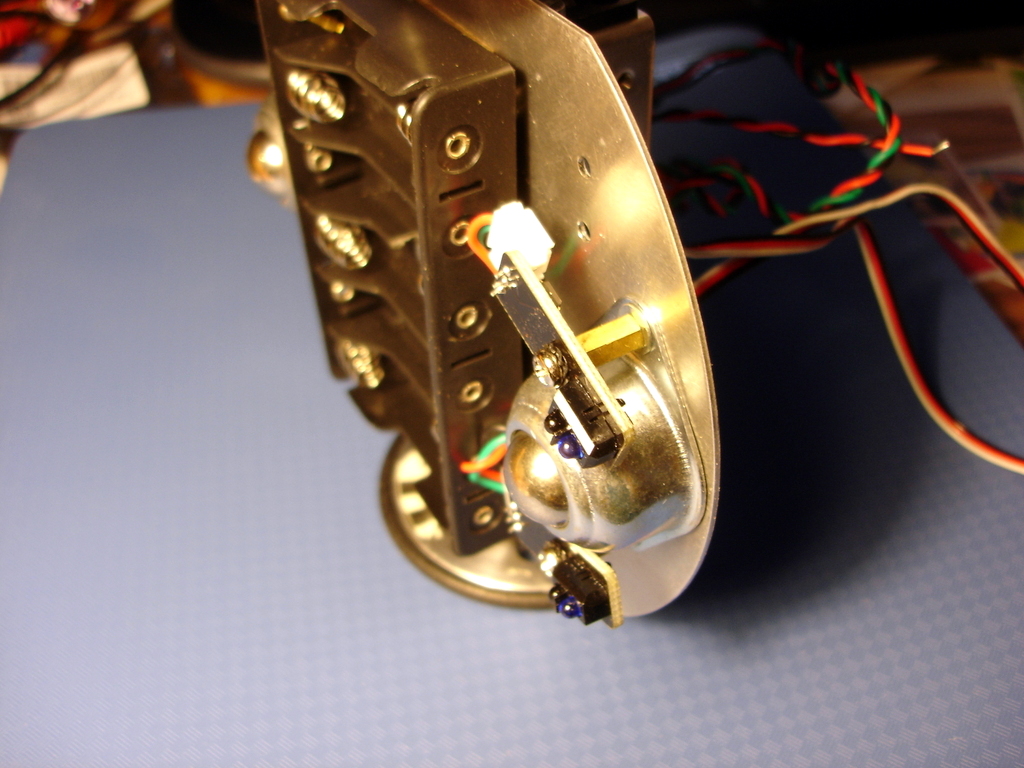
- deux capteurs réflex infra-rouge sous le châssis pour s’occuper de suivre la ligne au sol
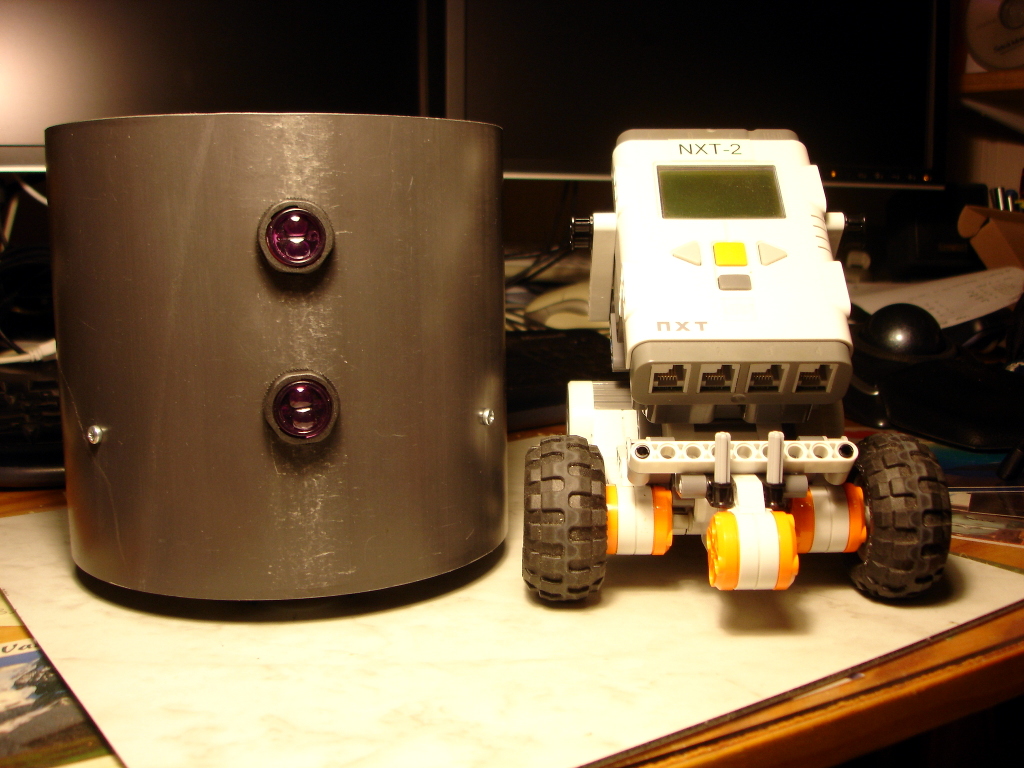
- deux capteurs de distance infra-rouge sur l’avant, pour détecter l’autre robot et éviter de le percuter
- un récepteur de télécommande infra-rouge pour le commander à distance (mise en route et arrêt)
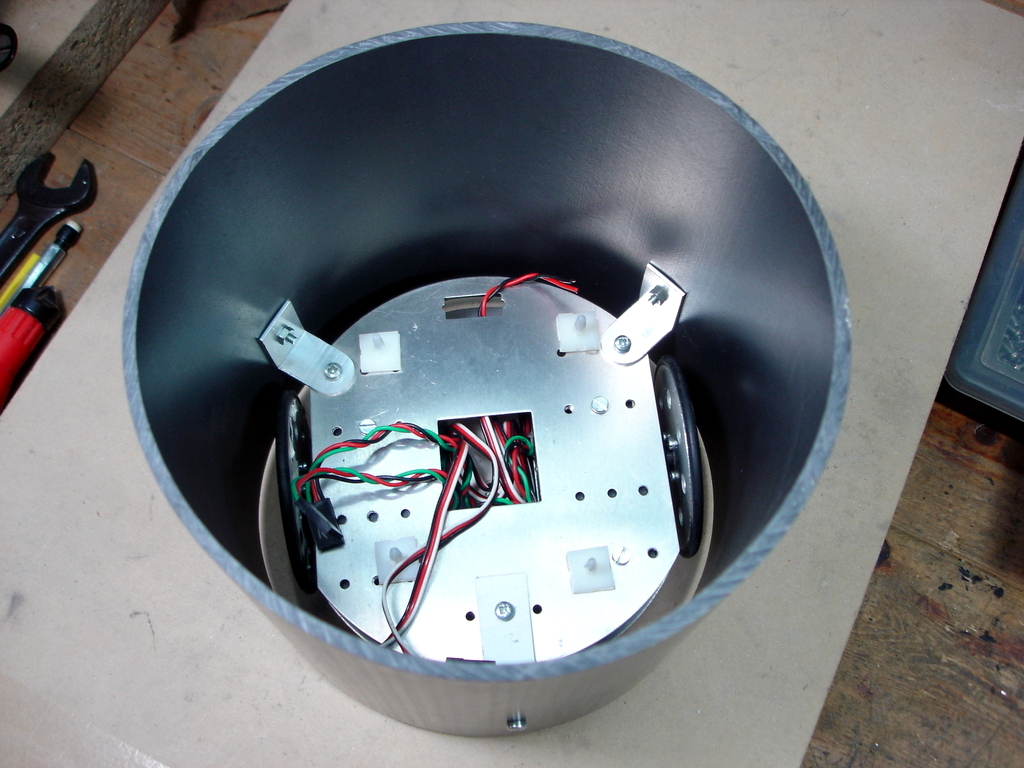
La carrosserie est faite dans un bout de tuyau PVC pour évacuation sanitaire. Pratique à travailler, pas cher,... Que du bonheur quoi, du moment que le tuyau a été nettoyé avant s’il n’était pas neuf :) Je vous rassure : celui-ci n’a jamais servi, car il s’agit d’une chute.
Quelques photos