 PoBot
PoBot
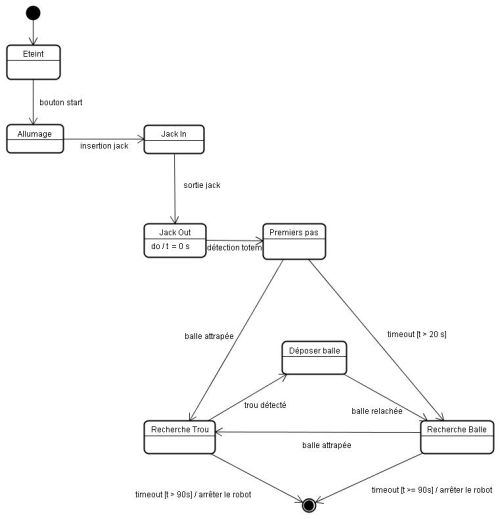
 Diagramme d’état
Diagramme d’étatLa stratégie principale :
- détecter les totems
- en déduire le parcours le moins dangereux
- assurer la première balle
En cas de timeout (mesure du temps maximal pour la première balle), on se retrouve dans la boucle principale : recherche balle / recherche trou.
version 19/02
ajout de l’état "dépose de balle"





Vos commentaires
# Le 15 février 2006 à 22:55, par Julien H. En réponse à : Détection du totem
En réponse à : Détection du totem
compte tenu de la dimension réduite du robot, on peut espérer faire une trajectoire fixe au démarrage pour assurer le premier point sans détecter le totem (disons sans utiliser l’information détectée).
Répondre à ce message