 PoBot
PoBot
Cet article présente la fabrication de la coque qui recouvre chacun des trois pieds, mais aussi des plates-formes intérieures qui soutiennent les roues et les moteurs. Il présente des astuces mécaniques qui nécessitent des connaissances en robotique, notamment les contraintes de poids, de couple et de vitesse et leurs effets sur les frottements et les glissements.
La coque
Le moule a été réalisé en polystyrène extrudé (disponible en grande surface de bricolage par couches de 6 (…)
Accueil > Mots-clés > Mécanique > moteur
moteur
Un moteur est un des composants électro-mécaniques essentiels pour un robot mobile, car 99% de ces machines en ont besoin pour se déplacer. Bien sûr il existe différents types de moteurs utilisés en robotique, et certains peuvent également servir à interagir avec l’environnement (pinces, bras).
Articles
-
 Fabrication des pieds de R2-D2
Fabrication des pieds de R2-D2
12 août 2012, par Jean-Pierre, Julien H. -
 Une motorisation en récup’
Une motorisation en récup’
24 mars 2013, par Eric P.Comment assembler à relativement peu de frais un groupe propulseur puissant pour un robot roulant.
-
 Banc de simulation dynamique
Banc de simulation dynamique
27 avril 2009, par Julien H.Ce nouveau projet consiste à tester le fonctionnement de différents moteurs dans des conditions proches de l’utilisation en robotique mobile sans avoir à subir les contraintes de mise en oeuvre réelle sur une base roulante.
Ainsi, ce banc de simulation servira à la fois aux débutants pour tester leurs algorithmes de contrôle, et aux plus expérimentés pour rechercher les paramétrages aux conditions limites de fonctionnement avant patinage. Lorsque nos tests seront terminés, nous pourrons (…) -
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1
24 juin 2012, par Eric P., Julien H.Nous avions testé la RoMeo peu après sa sortie en 2008, et plusieurs de nos robots l’utilisent, comme le Tankobot, Baba, Roverduino.
Une nouvelle version est sortie en 2011, et nous découvrons ses fonctionnalités.
Attention, une version 2.0 est sortie en 2013, et elle est très différente.
La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes (…) -
 BaBa, un robot piloté par Bluetooth (2011)
BaBa, un robot piloté par Bluetooth (2011)
15 juillet 2012, par Grégory Fromain, Julien H.Ce robot est l’oeuvre de Greg, un adhérent de l’association qui nous a rejoint en 2011.
Baba signifie Bot Arduino Bluetooth Android.
Le robot intègre de nombreux kits : Arduino, plate-forme 4WD, échanges Bluetooth, capteurs ultra-son, tourelle pan-tilt... ce qui en fait une plate-forme d’étude très pratique.
Il a été présenté lors de nos ateliers, puis a servi à une démonstration de mathématiques lors de la présentation MathC2+ de l’INRIA.
Le code source du projet est mis à jour (…) -
 Mini robots vibreurs
Mini robots vibreurs
24 mars 2014, par Gilles O.Je vous propose de réaliser un petit insecte vibreur ; c’est un bricolage facile à réaliser et qui ne demande qu’un matériel réduit (environ 3€ d’investissement).
-
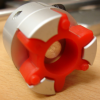 Accouplement moteur
Accouplement moteur
1er mars 2011, par Julien H.Une pièce spéciale est souvent nécessaire en robotique pour fixer une roue sur un moteur. Plus généralement, un accouplement moteur s’avère indispensable dans les conditions suivantes : quand l’axe moteur n’a pas la bonne taille (diamètre ou longueur) quand le moteur est d’accès difficile ou sensible
Différentes solutions
On peut réaliser un accouplement en faisant une pièce sur mesure.
On découpe un barreau d’aluminium et on perce chaque extrémité au bon diamètre, et on peut également (…) -
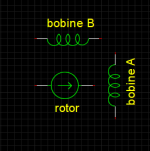 Moteurs pas-à-pas : comprendre les enchainements
Moteurs pas-à-pas : comprendre les enchainements
27 décembre 2012, par Julien H.Les moteurs les plus courants dans notre club sont les moteurs pas-à-pas... pourquoi ? à la fois parce que les modèles neufs sont peu onéreux, parce que les modèles de récupération se trouvent dans les imprimantes qu’on trouve par dizaines dans les poubelles, et parce qu’ils couvrent à peu près toute la gamme de taille et de puissance dont on a besoin.
Mais leur mode de contrôle est particulier. S’il a l’avantage de permettre un asservissement en position sans électronique et sans capteurs (…) -
 Le dSPIN de ST-Micro : un driver évolué pour moteur pas à pas
Le dSPIN de ST-Micro : un driver évolué pour moteur pas à pas
11 juillet 2012, par Eric P.Où il est question du L6470 de ST-Micro, également connu sous l’appellation "dSPIN"
-
 Moteur d’essuie-glace
Moteur d’essuie-glace
1er mars 2013, par Alban M.Bien isoler la masse d’un moteur d’essuie-glace pour le récupérer pour un robot mobile.
