 PoBot
PoBot
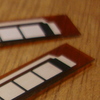
Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…)
Accueil > Mots-clés > Electronique > capteur
capteur
Un capteur permet de percevoir un signal physique. Il s’agit pour un robot de détecter son environnement ou pour le contrôleur principal du robot d’obtenir des informations sur le fonctionnement interne.
Quelques exemples concrets :
– capteur externe : un capteur de lumière permet de savoir si on est dans un endroit sombre ou éclairé.
– capteur interne : un capteur de courant permet de mesurer la consommation et détecter les problèmes (robot bloqué)
Il existe une multitude de technologies différentes : optique, ultrasons, mécanique, sans-fil, MEMS
Bien sûr cette liste n’est pas exhaustive et nous recherchons sans cesse de nouveaux capteurs. Tous les capteurs existant dans le domaine industriel ne sont pas encore accessibles au grand public, mais au fur et à mesure nous bénéficions des progrès réalisés en miniaturisation et en moyens de production, ce qui permet parfois de faire baisser les prix.
N’hésitez pas à nous contacter pour obtenir une information sur un capteur particulier. Découvrez ci-dessous les différentes rubriques et les articles que nous consacrons à l’étude des capteurs et à leur mise en œuvre sur des robots.
Articles
-
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
13 janvier 2011, par Julien H. -
 HMC6343 : une boussole intelligente
HMC6343 : une boussole intelligente
17 décembre 2011, par Julien H.Depuis une dizaine d’années, on trouve des boussoles électroniques à bon marché. La puce Honeywell HMC6343 propose désormais une plus grande définition mais surtout améliore la fiabilité aux variations de position grâce à un programme utilisant trois sources d’informations (température, accélération, champ magnétique) pour calculer le cap en corrigeant lui-même les erreurs.
Pourquoi payer 150 euros une puce quand on n’a besoin que d’un cap avec une précision d’un degré et que des puces à (…) -
 Découvrir le Leap Motion sous Linux
Découvrir le Leap Motion sous Linux
22 août 2013, par Julien H.Ces premiers pas ont été réalisés sous Linux avec le SDK Leap Motion en vue d’en faire un radar à obstacles pour robots mobiles.
Le Leap Motion est un boitier USB capable de détecter vos mains. Il n’est pas open source mais les kits de développement permettent d’utiliser les informations qu’il envoie depuis tout OS et beaucoup de langages (Python, Java, C++, C#, JavaScript)
Une fois déballé le capteur, on le pose devant soi et on le branche sur un port USB.
On se connecte au site web (…) -
 Transformer un capteur tout ou rien
Transformer un capteur tout ou rien
6 septembre 2008, par Julien H.Cet article présente un cas concret d’utilisation d’un capteur de présence (on/off) pour intégrer dans le temps ses valeurs et ainsi obtenir une valeur numérique plus intéressante.
Notre problématique est simple : on dispose d’un capteur de présence ou de proximité (PROXIR infrarouge dont on a déjà parlé ici) qui nous donne une indication très fugitive "je vois" / "je vois pas" et on voudrait en tirer un peu plus.
La solution est simple : on va mesurer le temps pendant lequel le capteur (…) -
 Accéléromètre Analog ADXL311
Accéléromètre Analog ADXL311
7 décembre 2008, par Julien H.Un accéléromètre est un composant de plus en plus courant dans des objets du quotidien : stabilisateurs d’image des camescopes numériques grand public, manette de console de jeux vidéo Nintendo Wii, etc..
On peut les utiliser dans des robots pour détecter des chocs, ou pour mesurer un déplacement (c’est un des composants d’une centrale inertielle, ou IMU, avec le gyroscope).
Les puces MEMS
L’accéléromètre que nous utilisons prend la forme d’un petit bout de silicium de quelques (…) -
 Anti-parasites pour capteur Sharp
Anti-parasites pour capteur Sharp
5 juillet 2011, par Julien H.Les capteurs GP2Dxx de Sharp sont très utiles pour évaluer une distance car ils sont simples à connecter et coûtent seulement une quinzaine d’euros. On les a déjà présentés dans cet article.
Modèles de capteurs Sharp chez Gotronic
Cependant lorsqu’on veut une bonne précision, il faut améliorer le capteur. Nous avions déjà traité le filtrage d’un signal analogique dans cet article.
Voici le problème :
Et l’explication est simple. Lorsque l’émetteur/récepteur infra-rouge fonctionne, il (…) -
Acquisition et transmission de signaux
7 février 2012, par Julien H.Bien que la plupart des capteurs utilisent un protocole standard, on a parfois besoin d’un autre mode de communication pour s’interconnecter avec des équipements existants.
Le cas le plus courant est l’utilisation de centrales de traitement fermées acceptant des périphériques RS-232 ou RS-485. Dans ce cas-là, impossible d’implémenter son propre circuit et de programmer l’acquisition. Il faut intervenir du côté du capteur afin de fournir les signaux attendus.
Pour les capteurs basiques (…) -
 Capteur de proximité IR
Capteur de proximité IR
30 juin 2007, par Julien H.description et première utilisation du module PROXIR de ere.co.th
-
 Gyroscope Wii Motion Plus
Gyroscope Wii Motion Plus
1er août 2009, par Julien H.On va essayer d’utiliser un gyroscope. Pour se simplifier la vie, on va prendre le gyroscope contenu dans le Wii Motion Plus, un plug-in pour la manette Wiimote de la console de jeux Wii de Nintendo.
Il s’agit en fait de deux circuits : un gyroscope à 2 axes, IDG-600 de InvenSense pour les angles de tangage et de roulis (pitch and roll), et un gyroscope à 1 axe de X3500W de Epson Toyocom pour l’angle de lacet (yaw).
Voici déjà un aperçu de quoi on va parler ici : des chiffres, des (…) -
 CMPS03 : une boussole I2C simple
CMPS03 : une boussole I2C simple
22 décembre 2011, par Julien H.La carte CMPS03 de Devantech est une boussole électronique : deux capteurs Philips KMZ51 orientés à 90° l’un de l’autre mesurent une résistance variant selon le champ magnétique terrestre, et un micro-contrôleur PIC 18F transmet les informations selon le mode souhaité (PWM ou I2C).
C’est la plus ancienne des boussoles électroniques dans le monde amateur (première utilisation au club en 2002) et depuis des solutions plus robustes (correction d’inclinaison sont apparues) ou moins chères (…)
