 PoBot
PoBot
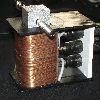
Une bobine peut servir d’électroaimant lorsqu’on l’alimente. Dans le cadre d’un TIPE, nous avons aidé deux étudiants de classes préparatoires aux grandes écoles du CIV à Valbonne et des Eucalyptus à Nice.
Afin de simplifier le contrôle du courant et la polarisation magnétique de la bobine, nous leur avons conseillé d’utiliser un pont en H, en l’occurrence le L298 inclus sur la carte Roméo de DFRobot (compatible Arduino).
En quelques minutes, en reprenant l’un des nombreux codes existant (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Electroaimant avec un pont en H
Electroaimant avec un pont en H
20 mars 2013, par Julien H. -
 Contrôle par Nunchuck sans fil
Contrôle par Nunchuck sans fil
30 juin 2011, par Julien H.Contrôler un robot à distance, quelle idée ! C’est bien plus amusant de le rendre autonome et d’apprendre étape par étape à améliorer son comportement.
Pour ceux qui veulent quand même utiliser une télécommande, autant le faire de manière fun avec un Nunchuck, l’accessoire de la manette Wii qui tient dans le creux de la main, avec quand même un joystick au pouce, deux boutons à l’index et au majeur, et surtout un accéléromètre trois axes.
On connaissait déjà la version classique, avec un (…) -
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
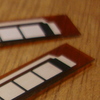
13 janvier 2011, par Julien H.Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…) -
 Flasher le bootloader d’une carte Arduino
Flasher le bootloader d’une carte Arduino
8 janvier 2014, par Gilles O.J’ai tout cassé ma belle carte Arduino Leonardo (un clone en fait), elle ne fonctionne plus. Elle n’est plus reconnue sur le port USB, c’est la cata. C’était ma première en plus, elle avait une certaine valeur sentimentale...
J’en ai parlé à Julien qui m’a dit qu’il restait une ultime chance : tenter de reprogrammer le logiciel de démarrage (bootloader) dans la puce de la carte, on ne sait jamais... Et là il plonge la main dans un carton et me sort un programmateur USB pour AVR de derrière (…) -
 Caméras et Arduino
Caméras et Arduino
20 mars 2011, par Julien H.On nous demande souvent si une Arduino peut "envoyer des informations" d’une caméra ou traiter les informations de deux caméras pour faire un algorithme de reconnaissance 3D ou bien d’autres traitements complexes de ce genre.
Préambule
Il faut rappeler qu’une Arduino est un micro-contrôleur (famille AVR) et qu’il existe des modèles de caméras pilotées par AVR. Donc rien d’infaisable. Mais il faut aussi dire qu’il y a différents types de caméra, donc la question nécessite un peu de (…) -
 Contrôleur 3D sans contact
Contrôleur 3D sans contact
22 octobre 2008, par Julien H.Nous présentons ici une mise en application des capteurs capacitifs par une expérience simple dans une configuration ludique. On peut ainsi sans aucun contact détecter la présence et même estimer la distance à un objet de taille importante.
L’utilisation de ces capteurs peut servir sur un robot pour détecter les murs ou les adversaires. La précision est certes moindre qu’un radar électronique à ultrasons ou à infrarouge, mais c’est très économique et permet d’ajouter une détection dans (…) -
 Udev à la rescousse !
Udev à la rescousse !
13 juillet 2012, par Laurent Ba.quelques astuces avec udev...
-
 Traitement du son par FFT (fast fourier transformer)
Traitement du son par FFT (fast fourier transformer)
20 mai 2013, par Audrick F.retour d’expérience de la FFT pour le robot DrikyBot
-
 Delta Bot - robot parallèle (2012)
Delta Bot - robot parallèle (2012)
4 octobre 2012, par Jean-Pierre, Julien A., Julien H.Les robots "delta" sont des systèmes mécaniques parallèles, c’est-à-dire avec plusieurs liaisons entre deux mêmes pièces mobiles. Nous les avions déjà présentés dans cet article.
Ces machines servent habituellement au "pick & place", un dispositif asservi pour récupérer des objets et les déplacer à un endroit bien précis, comme pour ranger des chocolats dans une boite de Noël ou pour positionner les composants à souder sur une carte électronique.
Nous avons réalisé un exemple de ce (…) -
 Capteur de couleur TCS230
Capteur de couleur TCS230
5 septembre 2013, par Julien H.Évaluer la couleur d’un objet abordé par un robot passe par un capteur de lumière capable de différencier chacune des composantes, généralement à partir d’un filtre.
Le capteur présenté ici est une grille de 64 récepteurs miniatures avec trois filtres rouge, vert, bleu permettant de déterminer une teinte avec suffisamment de précision.
Nous avions déjà testé des photodiodes recouvertes d’un filtre coloré afin de déterminer une couleur. Cependant le montage d’amplification du courant (…)
