 PoBot
PoBot
 Mécanique du Pobot Easy
Mécanique du Pobot EasyLa mécanique de notre robot autonome "Pobot Easy" utilisera la plateforme d’Easyrobotics qui donne son nom au robot.
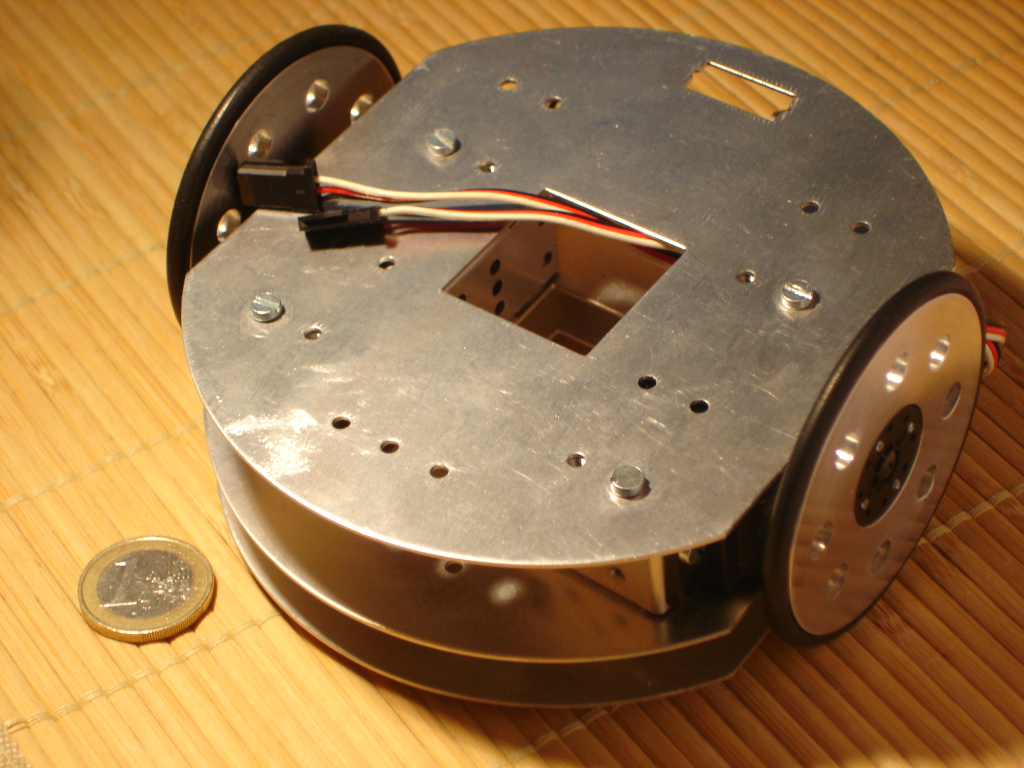
C’est un robot de type char à base de servomoteurs en rotation continue et de roues de grande dimension (plus hautes que la base roulante). Le chassis est construit à partir de disques d’aluminium taillés (pour avoir des côtés rectilignes et des passages de câbles) reliés par des entretoises et par les cages des moteurs.
On nommera les différents étages ainsi, en partant du bas :
– l’étage "sol" en-dessous du premier disque
– l’étage "batterie" entre le premier et le second disque
– l’étage "moteurs et capteurs" entre le second et le troisième disque
– l’étage "pilotage" au-dessus du troisième disque
D’autres étages seront possibles mais ne feront pas partie de base mécanique.
Les moteurs
Le servomoteur utilisé est un Futaba S3003 modifié pour tourner en continu (une modification mécanique et électronique). Nous étudierons dans un article dédié leur comportement et leur possibilité de commande.
Chaque moteur est enfermé dans une cage en aluminium (la brique "Easy" de Easyrobotics) qui permet à la fois son bon maintien (on utilise les 4 points de fixation du servomoteur) et sa fixation sur le chassis (ou plutôt l’inverse, puisque ces cages servent d’entretoise.
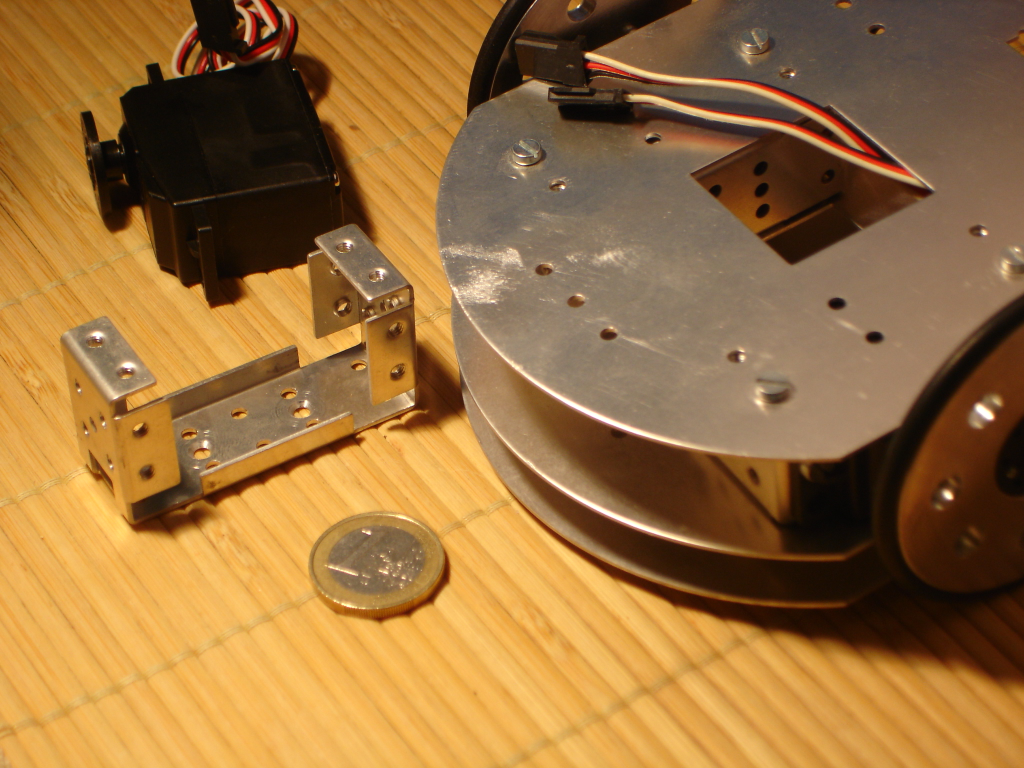
L’alignement des roues est optimal grâce au perçage de trous adaptés aux briques Easy dans les disques (commande numérique).
Les roues
Elles sont composées d’un disque en aluminium d’un seul bloc, rainuré sur son tour en biseau doux pour creuser une gorge dans la tranche afin d’accueillir un joint caoutchouc.
Une roue fait 4 mm d’épaisseur pour 66 mm de diamètre (joint caoutchouc en position). L’axe est particulièrement travaillé puisque la forme d’un moyeu palonnier rond de servomoteur (servo horn) y est creusée pour permettre sa fixation à l’aide de 4 vis. On peut alors fixer ou enlever la roue du servomoteur en gardant le système classique de la vis centrale unique.

La cage à électronique
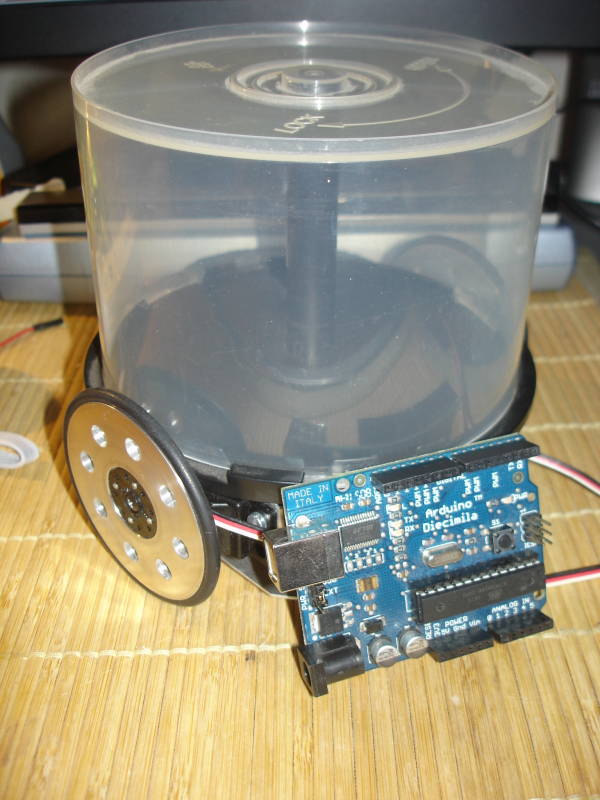
Comme ce robot doit pouvoir être utilisé par tout le monde, on va isoler l’électronique du châssis conducteur. Donc plutôt que de glisser des cartes électroniques entre les étages comme c’était notre intention initiale, on va plutôt utiliser une boite en plastique pour tout contenir.
Au vu de la forme ronde du robot, nous avons pensé à un "spinder" de CD : une tour plus ou moins haute (selon que vous y mettiez 10, 25, 50 ou 200 disques) avec un socle en plastique rigide et une enveloppe qui se fixe dessus en plastique transparent.

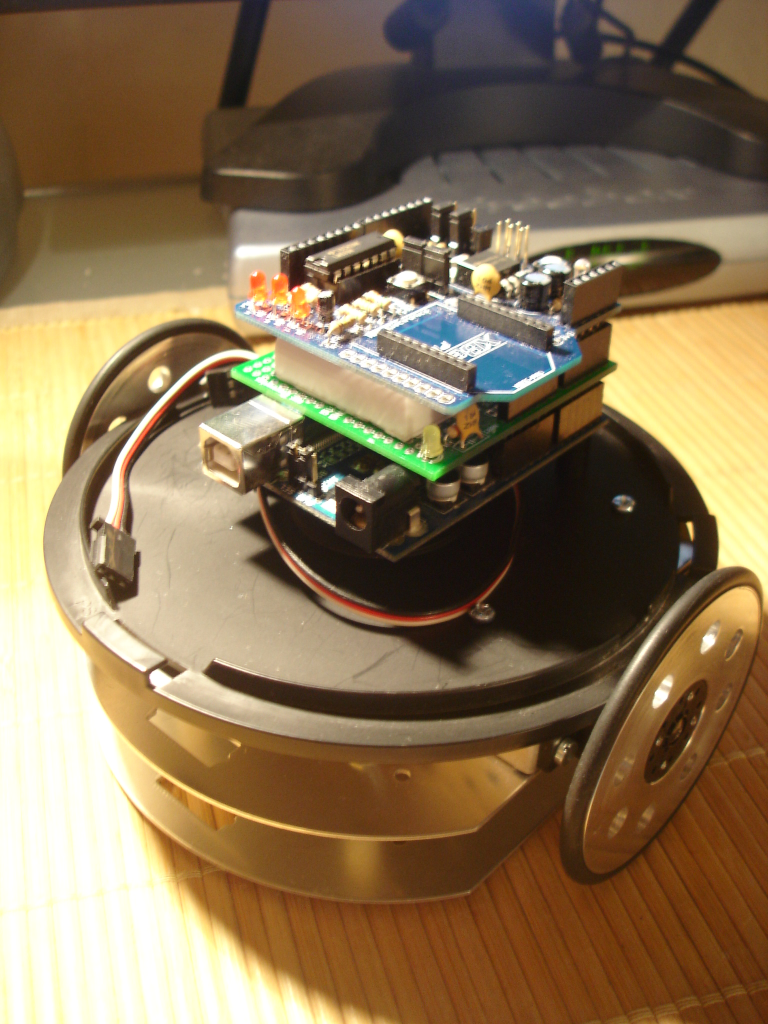
Voici un aperçu avant modification. L’Arduino donne l’échelle.
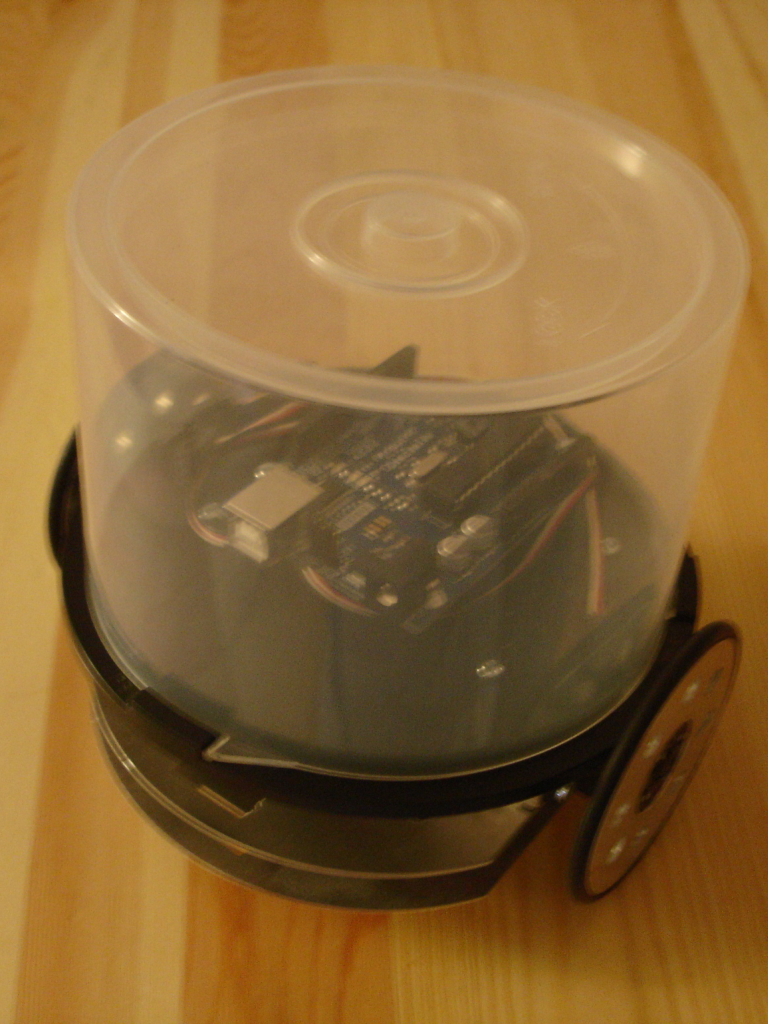
On perce des trous et on allonge les vis de fixation aux cages des briques Easy (servomoteurs).

On perce deux autres trous pour les entretoises qui tiennent l’Arduino et on peut ensuite empiler les shields et recouvrir du couvercle.






Vos commentaires
# Le 10 janvier 2009 à 16:18, par ? En réponse à : mécanique du Pobot Easy
En réponse à : mécanique du Pobot Easy
Une carte électronique a été développée pour cette base roulante.
Disponible chez Electronique Diffusion.
Cordialement,
# Le 11 janvier 2009 à 09:09, par Julien H. En réponse à : mécanique du Pobot Easy
En réponse à : mécanique du Pobot Easy
Ah oui ? Laquelle ? Leur site n’est pas du tout clair et s’ils ont une carte faite pour ce robot, ce serait quand même logique qu’ils la référencent depuis la page où ils vendent le châssis.
En tout cas j’aimerais bien la voir... et l’avoir, pour faire des tests et peut être revoir la solution électronique que nous avions prévue pour ce robot !
# Le 15 mars 2009 à 12:33, par ? En réponse à : mécanique du Pobot Easy
En réponse à : mécanique du Pobot Easy
Voici le lien vers la carte en question :
# Le 16 mars 2009 à 11:12, par Julien H. En réponse à : mécanique du Pobot Easy
En réponse à : mécanique du Pobot Easy
Merci, effectivement comme j’achète le kit complet, je n’avais pas eu l’idée d’aller chercher dans les "pièces détachées".
Elle est très intéressante à première vue (beaucoup de choses intégrées) mais je me méfie de ces cartes "tout en un" car nous avons eu une expérience difficile avec une carte similaire, la "Polybot" qui intègre aussi un écran LCD, la commande de moteurs continus (4), des connecteurs pour les servos, pour les entrées analogiques, etc... Le problème c’est que la Polybot utilise des latches de partout, ça crée des impédances sur les entrées/sorties et quand on veut faire autre chose qu’afficher "Bonjour" sur l’écran LCD, ça devient une galère pour les débutants. Surtout, il faut la souder sans se tromper, et pour un débutant c’est tout sauf évident, donc à moins d’y mettre 90 euros (kit soudé) on prend des risques.
Mais je ne demande qu’à me tromper et comme j’ai beaucoup de respect pour Frédéric Giamarchi, le papa de cette carte et un auteur de manuels passionnants sur la robotique ludique, je demanderai au Père Noël (ou à Electronique Diffusion s’ils répondent un jour à mes mails) de me prêter cette carte pour qu’on puisse en faire l’étude impartiale qu’elle mérite.
Répondre à ce message