 PoBot
PoBot
 Tour d’horizon des SLAM open source
Tour d’horizon des SLAM open sourceROS par Willow Garage
ROS ne propose pas qu’un SLAM mais tout un environnement de contrôle pour la robotique. Sans doute l’implémentation la plus directe à utiliser.

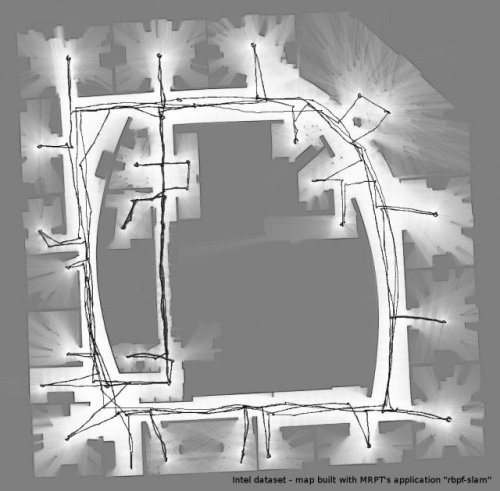
Mobile Robot Programming Toolkit ou MRPT
Là encore, le SLAM n’est qu’un aspect de l’environnement proposé. Une implémentation qui rencontre un certain succès en France (défi CAROTTE) utilisé par Robopec, Effidence, etc..
La version 2D du SLAM est disponible par défaut dans les paquets d’installation d’Ubuntu (au moins depuis la version 10.04) pour simuler une détection à base de télémètres très simples.
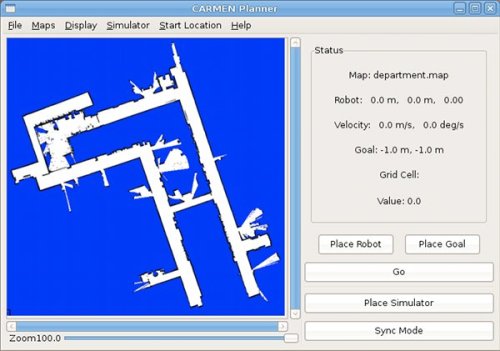
CARMEN
Moins connu, il s’agit pourtant là encore d’un ensemble de fonctions pour le contrôle d’un robot mobile. Le format de log est réutilisé dans d’autres
Open SLAM
Ce site web ne fournit pas une implémentation de SLAM, mais plusieurs. Il s’agit en fait d’un portail fournissant l’hébergement de codes sources et d’articles pour les développeurs de SLAM.
Il s’agit d’une initiative universitaire : le résultat est donc plutôt austère et pauvre en explications. Créé en 2007 par trois chercheurs allemands, il était toujours opérationnel en 2010 puisque le dernier dépôt date de juin.
Les algorithmes viennent de plusieurs pays, c’est très intéressant de pouvoir comparer ce que les différents laboratoires peuvent produire. Y compris en France, avec une contribution de Mines ParisTech.
Certains codes sont en GPL, d’autres en Creative Commons.
On retrouve beaucoup de Matlab, mais aussi du C++, parfois du Java.
En terme de sources d’informations, certains SLAM utilisent des caméras, d’autres des listes de points (donc plutôt des télémètres).




