 PoBot
PoBot

Pour écrire le module de contrôle du bras, j’ai commencé par tester la communication par fifos.
On trouvera dans l’archive ci-joint tout ce qu’il faut pour tester la communication :
– bras_ctrl.c : le module RT kernel
– test_bras.c : le programme de test
Utilisation :
– lancer "make test", tout est automatique
– à la question, choisissez 1) pour lancer le test
– à la question, choisissez 0) pour quitter le test
C’est fini ! dans la console, vous devez voir la compilation des programmes, ainsi que l’insert des modules rt et de notre module bras_ctrl (le + confirme que l’opération s’est bien déroulée) :
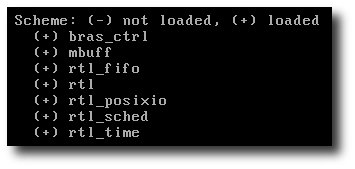
ainsi que les dernières traces du noyau :
Explications de ce qui s’est passé :
– démarrage de rtlinux (rtlinux start)
– installation du module (insmod bras_ctrl.o)
– lancement du prog de test (./test_bras)
– affichage de la console noyau (dmesg)
– désinstallation du module (rmmod bras_ctrl)
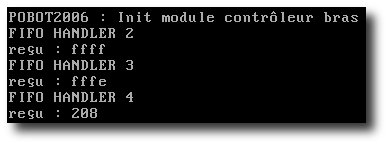
Que voyez-vous dans la console :
– le message d’init du module (POBOT2006...)
– 3 réveil de la méthode de lecture des fifos (FIFO HANDLER)
– lecture de la fifo concernée et conversion du résultat en hexa




