 PoBot
PoBot
 Logiciel de configuration du bipède
Logiciel de configuration du bipèdeCe logiciel est obsolète (quoi qu’intéressant pour débuter). Une version avec Pure Data a été réalisée.
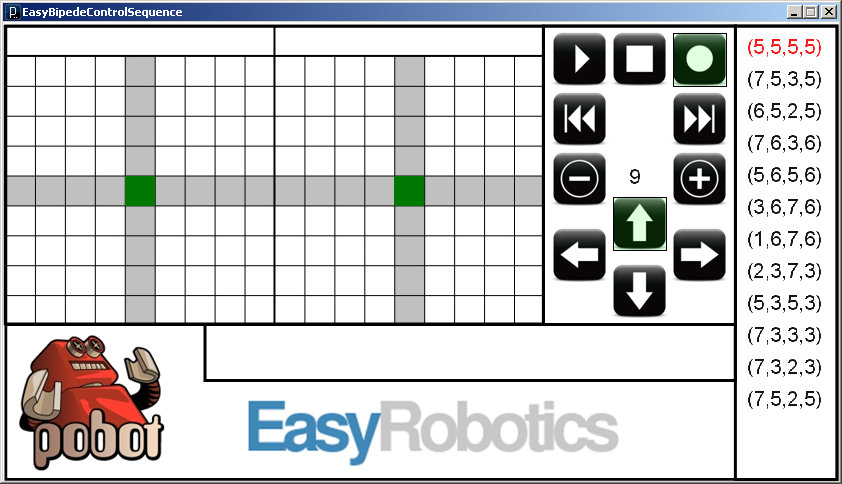
Cet article présente le logiciel de configuration du robot bipède à 4 servos offert par Easyrobotics. Attention, je dis "configuration" pour ne pas dire "contrôle" car l’objectif est d’en faire un robot autonome, mais ce logiciel permet effectivement de contrôler les différents mouvements du robot et peut servir de télécommande pour des démonstrations, puisqu’on s’en sert pour les réglages.
Pourquoi une configuration ? Ce n’est pas une perte de temps ? En fait il y a une grande différence logicielle entre un robot à roues et un robot bipède : dans le premier cas, on met sous tension les moteurs et ça avance. Le robot est donc autonome mais stupide, et ensuite on va essayer de le rendre plus malin.
Dans notre cas, c’est plus délicat : un robot qui avance par équilibre sur chacune de ses deux jambes doit déjà être "intelligent" avant d’être autonome. Je veux dire par là que ses moteurs peuvent bouger dans tous les sens et ne pas le faire avancer d’un centimètre, donc il faut donner au robot une démarche, et ce n’est pas une tâche aisée, d’où l’idée d’avoir un logiciel permettant de tester la configuration.
Pour cela, on va déjà donner des "oreilles" au bipède pour qu’il puisse recevoir des consignes de moteur qu’il va reproduire pour mettre en mouvement ses jambes. Notre étude de conception (voir autre article) détaillera les principes retenus. Il faut juste retenir que le robot embarque un programme qui reçoit 5 caractères : "5555p" signifie tous les moteurs au milieu et "1199p" signifie les 2 moteurs de la jambe gauche au minimum et les 2 moteurs de la jambe droite au maximum. Pour chaque paire, le premier caractère désigne le moteur du genou et le second caractère le moteur de la hanche. Il existe un caractère spécial : "0" qui permet de conserver la valeur précédente et donc d’agir seulement sur certains moteurs ("0300p" ne bouge que le moteur de la hanche de la jambe gauche).
Logiciel pour Arduino
Pour simplifier la commande (au moins dans un premier temps), on utilisera un seul chiffre pour modifier la position des servos :
– 0 : pas de modification
– 1 à 4 : 4 positions inférieures
– 5 : position médiane
– 6 à 9 : 4 positions supérieures
Ainsi si on envoit "5555", on se retrouve avec la position par défaut.
Le code en cours de modification est disponible sur notre playground (code open-source LGPL) en attendant d’en faire un projet à part entière.
Logiciel pour Processing
Le code est également sur le Playground Pobot, avec deux archives de la version que j’utilise.
Mais cela nécessite que vous ayez Processing et toutes les bibliothèques qu’on utilise. Par exemple ProXML :

Vous pouvez donc utiliser l’application ci-dessous pour Windows, mais qui nécessite que votre port série pour communiquer avec le robot soit sur le deuxième port série (j’utilise un adaptateur USB/série et pas le port COM de mon PC).
Manuel d’utilisation
Suivez le guide !




