 PoBot
PoBot
Présentation :
Le globe lévitant est un petit globe terrestre qui utilise des principes d’électromagnétisme pour tenir en sustentation sous un électroaimant. Il s’en produit plusieurs millions par an.
Quoi de plus ludique et amusant qu’un objet qui flotte et tourne dans le vide ???

Démarche :
J’ai réelaboré le système étape par étape, choisissant les solutions techniques qui me paraissaient appropriées et suffisamment simples pour les appliquer. Par l’éxperimentation j’ai cherché à obtenir la stabilité du globe.
1-) Introduction
a- Cahier des charges
Le cahier des charges m’a permis de ne pas trop m’éloigner de mon objectif final (c’est à dire de m’approcher au plus près des globes du commerce).
- Prix le plus faible
- Globe stable
- Asservissement en position grâce à un capteur optique
- Encombrement minimal de l’électronique
- Alimentation externe 12v
- Courant max : 1A.
- Dégagements de chaleur de la bobine minimes. (ma première bobine a brûlé, la deuxième était non émaillée donc équivalait à un dé de cuivre !)
voilà le concept :
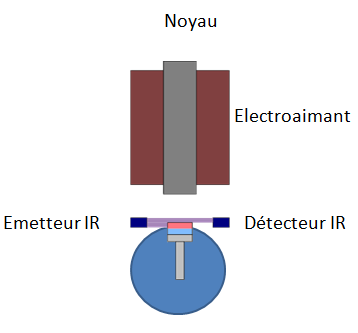
On fait traverser un courant à une bobine de cuivre. Cela va génerer un champ magnétique qui est récupéré par le noyau et redirigé vers l’aimant. Celui-ci sera alors attiré par la bobine jusqu’à... se coller ! Et oui, l’aimant est ...aimanté. Sauf si on arrête d’alimenter la bobine à temps. A ce moment là, l’aimant est rattrapé par la gravité et donc, il retombe. D’où l’asservissement en position. On alimente avant qu’il ne tombe, on coupe l’alimentation avant qu’il ne se colle. Et on recommence.
NB : un écrou marche aussi... mais l’effet est moins impressionnant car il doit etre nettement plus proche de la bobine (2mm pour un écrou, pres de 3 cm pour mon aimant)
b- Avant-propos
Je n’ai pas inventé la poudre. J’ai tiré une infinie d’infos sur le site de pobot que je citerai ou dont je me référerais régulièrement.
J’ai aussi étudié les propriétes électromagnétiques de mon aimant et de ma bobine qui expliquent certains de mes choix et je vous invite à y jeter un petit oeil, c’est par là : Mesure-du-champ-electromagnetique
2-) Chaîne d’énergie —Montage pratique de la bobine
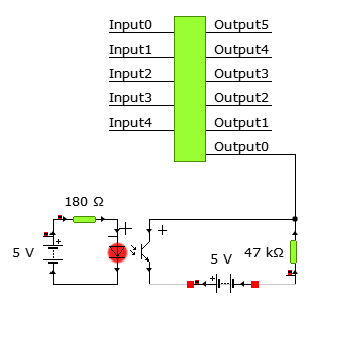
Une fois une bonne bobine et un bon noyau (avec des symetries correctes) assemblés, vous voilà maître d’un électroaimant. Après, le commander est un jeu d’enfant. J’avais une arduino dueminalove avec une extension motordrive donc l’alim n’était pas compliquée car integrée dans l’extension.
Ci-joint le code, rien de grandiose. Mais avec les capteurs ça devient plus intéressant.
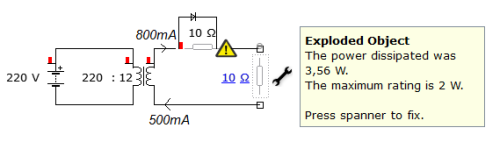
ATENTION à bien dimensionner le courant traversant l’électroaimant faute de tout bruler ! 2,5 watts c’est largement suffisant pour brûler les petites résistances (testé). Pour pallier à ce problème, j’ai rajouté une résistance de 10 Ohms qui peut résister à 5 Watts.
Voilà le code
3-) Chaîne d’information
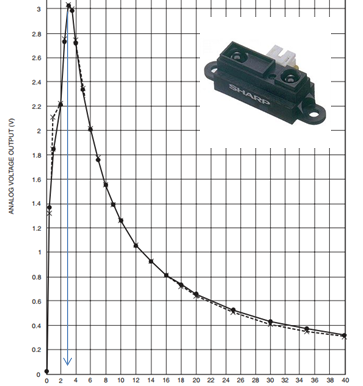
a- 1ere approche : Capteur sharp -
Pour maitriser le codage de l’arduino et tenter une première approche, le capteur sharp était parfait.
http://www.pobot.org/Capteur-IR-Sharp-GP2D120.html
http://www.pobot.org/Anti-parasites-pour-capteur-Sharp.html
Je ne m’appesantis pas.
b- Améliorer le coût et la réactivité : Capteur IR -
J’ai récupéré un super code qui marche très bien sur cet article qui provient du site de l’atelierjcm. J’ai utilisé un émetteur IR (photodiode) et un recépteur IR.
Mon idée était de transformer le récepteur qui envoie des infos de 1 à 1000 à l’arduino en un capteur tout ou rien. Rien de plus simple, j’ai un peu modifié le code pour qu’au dessus de 500 on soit à l’état bas (=on capte) et au dessous à l’ état haut (=on ne capte rien).
J’ai bien sur adapté ce code à mon électroaimant, mais ce n’est que du copier-coller du premier code dans le deuxième.
J’aurais aimé essayer par la suite avec des capteurs hall. Mais l’expérience avec des capteurs optiques n’a pas été assez concluante pour m’en donner le temps. En effet, le temps de réponse était encore trop grand pour avoir un asservissement précis pour permettre une stabilité durable
c- Temps de réponse -
Une idée sympa est de pouvoir récuperer plus d’informations de mes capteurs optiques comme par exemple le temps de réponse ou le temps de présence devant les capteurs.
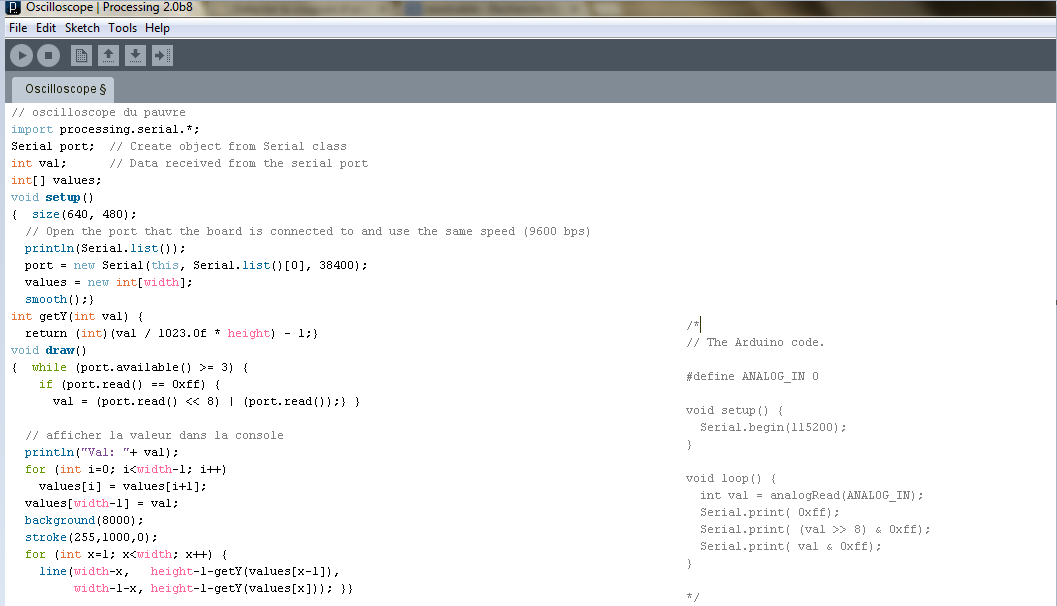
Pour cela, je me suis servi de l’oscilloscope du pauvre sur processing dont je redonne rapidement le code (condensé en une seule capture d’écran, très moche, mais peut être utile pour certains) : http://www.pobot.org/IMG/png/procdzd.png
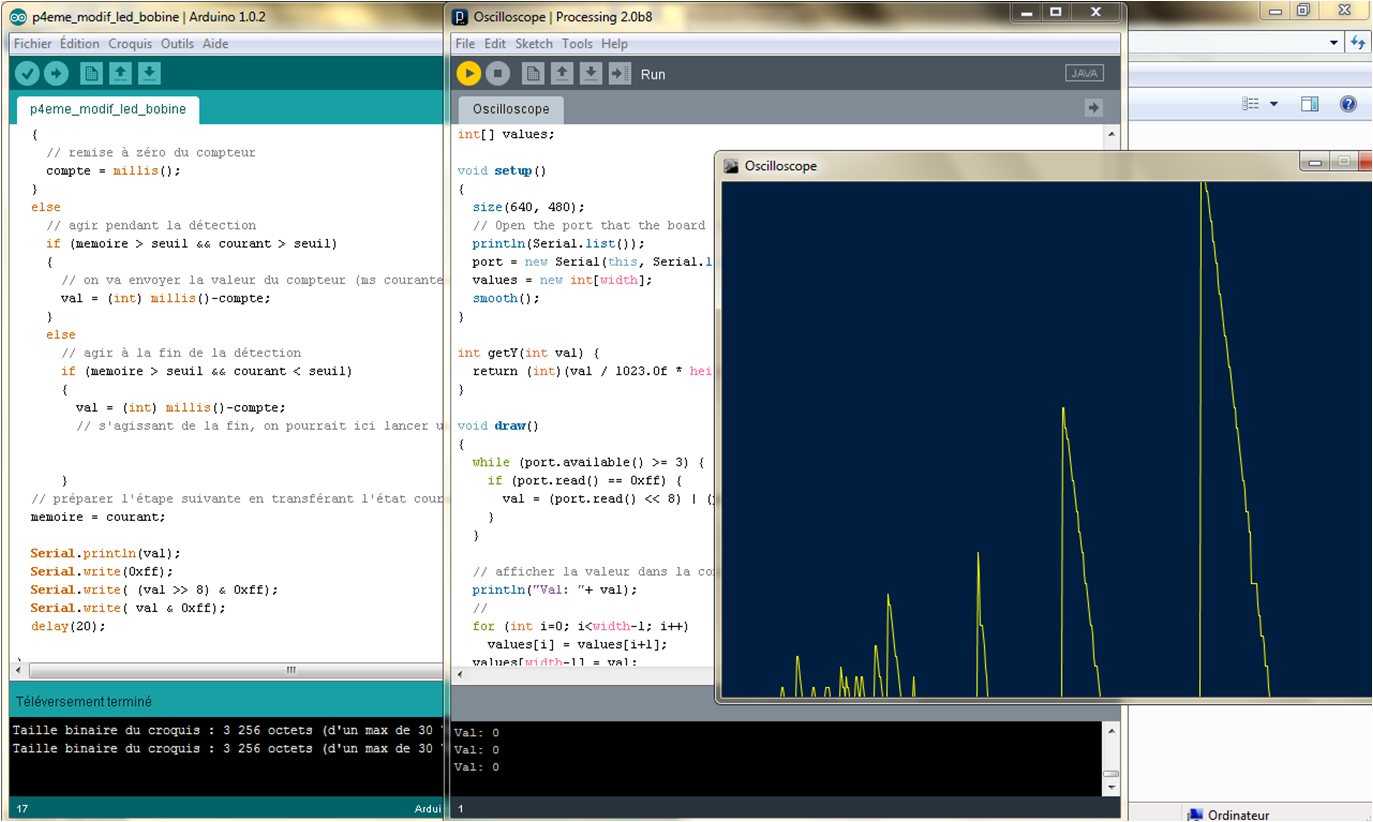
Ici, c’est le temps que ma main a mis pour couper le faisceau. Plusieurs fois, de plus en plus vite. Les valeurs vont de une seconde toute en haut du graphique à 0 secondes en bas.
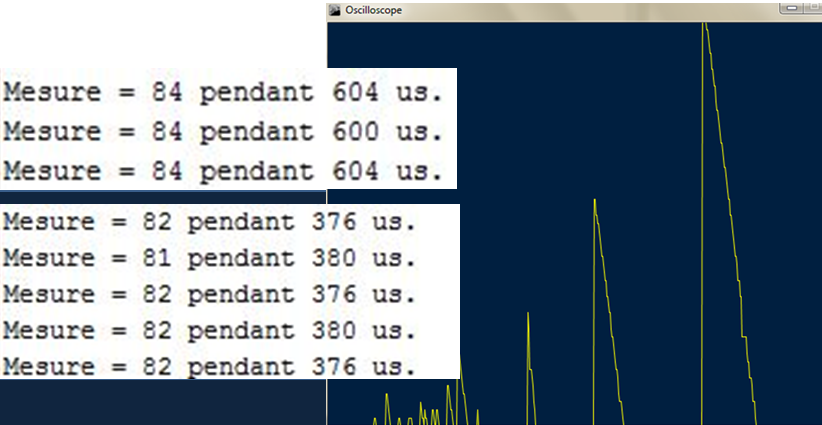
Ici, c’est l’indication du temps entre chaque mesures avant et après amélioration du code. Sans cette info, je n’aurais jamais pu le faire. On peut voir que j’ai pu diviser le temps de réponse par deux en augmentant le nombre de lectures.
Pour y arriver, je me suis servi de cet article :
transformer un capteur tout ou rien
Le capteur utilisé étant différent du mien, il a fallu inverser le code (l’état haut du capteur choisi est l’équivalent du mien à l’état bas). A la suite de quoi j’ai rajouté deux lignes de codes pour faire en gros “ temps valeur finale moins temps valeur précedente= temps de lecture”
Ce qui donne le code final suivant (que je vous laisse le loisir de décrypter) :
3-) Comparaison maquette - produit existant
a- Montage final -
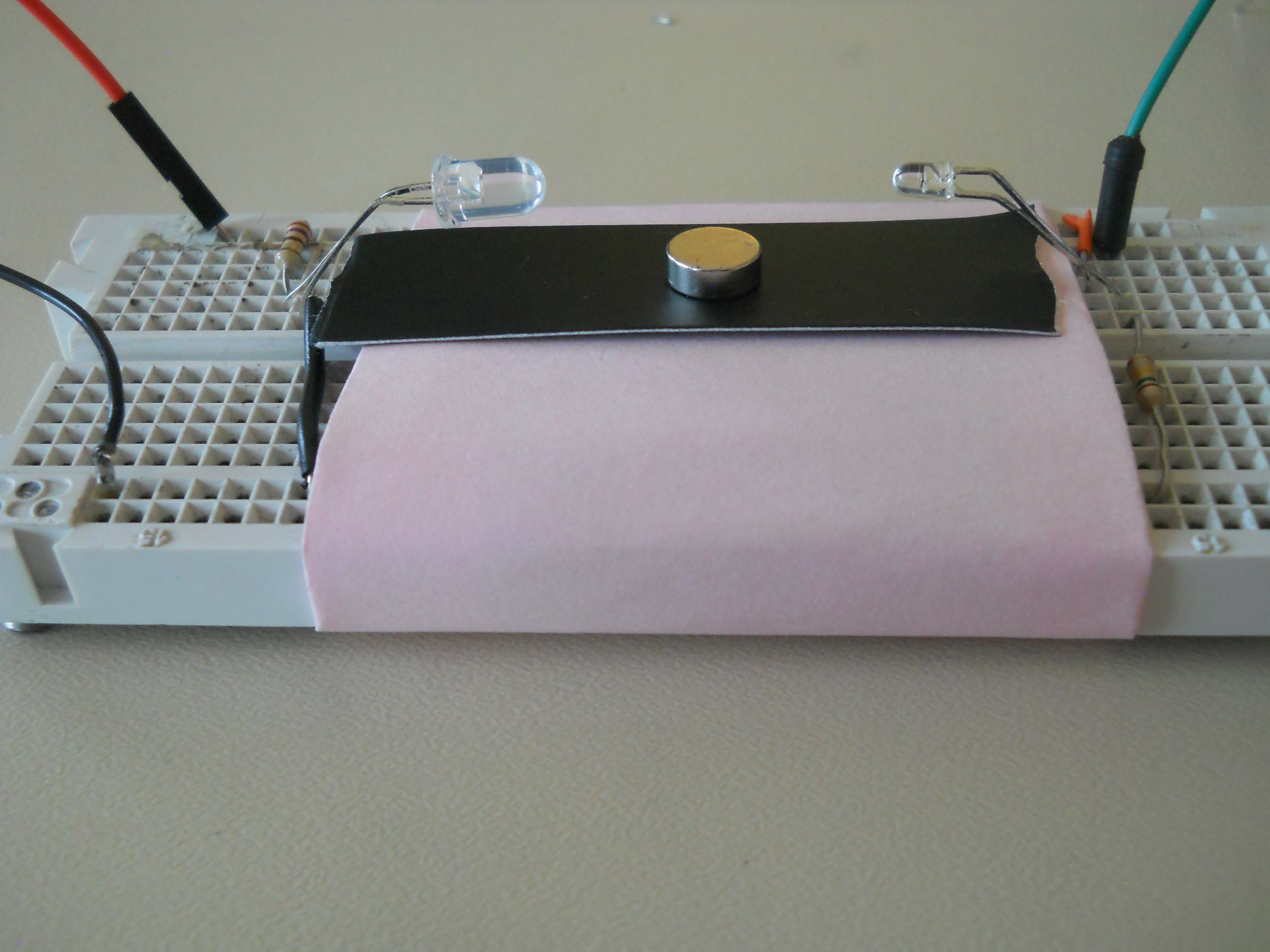
Finalement, J’ai assemblé le tout. J’ai placé ma barrière infrarouge à la position d’équilibre sous l’électroaimant. Pour la trouver, j’ai alimenté ma bobine et j’ai juste approché mon aimant sous celle-ci. Puis simplement constaté l’endroit où il était presque attiré.
Ensuite j’ai placé mon aimant à l’intérieur d’une boule de noël pour augmenter sa stabilité. En effet, si rien n’est fait, l’aimant vrombit puis s’en va dans n’importe quelle direction.
Ensuite j’ai lancé mon code pour le montage complet. Génial, çà a marché ! Même si ce n’est qu’une seconde, je pense que les seules améliorations possibles sur un montage aussi simple sont celles liées au temps de réponse. Après avoir cherché un peu je suis descendu jusqu’à une mesure toutes les 300 Microsecondes !
Le montage final :

b- Bilan
J’estime le prix de mon modèle à environ 30 euro (bobine, électronique, support) et celui du commerce à environ 20 euros. Commercialisés en moyenne pour une quarantaine d’euros, la marge est donc très intéressante.
De plus l’encombrement des deux est à peu près similaire, mis à part que ma solution utilise des capteurs optiques plutôt que des capteurs de champs. Sinon, la lévitation s’opère à égale distance (environ 2 cm). Le poids de l’objet soulevé dépend de la taille et du diamètre de fil du solénoïde ainsi que de la qualité et de l’orientation du fer doux.
Etant donné que la solution du commerce est optimisée au maximum, ma maquette reste expérimentale mais s’en rapproche quand même fortement. Le problème de stabilité est surement résolvable avec quelques connaissances supplémentaires. Le temps me permettra de les acquérir et d’améliorer ma maquette.
Problèmes que j’ai rencontré :
- Instabilité
- Récupération des données pc et Amperemètre => pertes
- Temps de lecture du microcontroleur
- Déreglage fréquent de la barrière infrarouge
Ce qui a bien marché :
- Alimentation en 500mA
- Etablissement rapide du courant dans la bobine
c- Idées d’amélioration
- Passer à un capteur hall qui mesure le champ magnétique (Champs de l’aimant et de la bobine => j’ai estimé cette solution trop compliquée pour mon niveau). Cependant, j’ai essayé et les résultats sont utilisables, mêmes si améliorables. C’est cette solution qui est choisie dans le commerce.
- Inverser le courant dans la bobine plutôt que de simplement l’arrêter (?).
- La solution la plus évidente est de moduler le signal (c’est à dire d’envoyer plusieurs signaux dans l’électroaimant) pour créer plus de stabilité. Cette solution était trop loin de mes capacités, voilà pourquoi je suis resté simple.
- Une autre encore est de faire un asservissement avec des correcteurs. A approfondir.
Conclusion
Mon globe ne lévite pas très bien, mais il y tend, et le montage est donc très proche de la réalité !
Le plus long a finalement été de trouver le matériel adéquat. Bobine, composants, arduino... Mais le plus difficile, çà a été de coder le capteur optique, noyau de l’asservissement.
Maintenant c’est à vous de faire mieux !
[1]
[2]






{kind=link}
Vos commentaires
# Le 8 janvier 2015 à 17:42, par issam En réponse à : Lévitation électromagnétique
En réponse à : Lévitation électromagnétique
s il vous plait vous pouvez me donner une explication plus simple sur ton code final
Répondre à ce message
# Le 25 septembre 2014 à 14:53, par Bozenhardt En réponse à : Lévitation électromagnétique
En réponse à : Lévitation électromagnétique
Bonjour je suis étudiant en prepa TSi et j’ai choisi comme sujet de TIPE pour l’année 2015 : La sustentation électromagnétique. J’aurais voulu savoir si il était possible d’avoir de plus ample informations sur démarche utilisée ainsi que sur la puissance de la bobine utilisée ect...
Merci.
# Le 25 septembre 2014 à 15:22, par Eric P. En réponse à : Lévitation électromagnétique
En réponse à : Lévitation électromagnétique
Le plus simple est de contacter son auteur, en cliquant sur son nom en-dessous du titre de l’article.
# Le 26 septembre 2014 à 11:18, par Benoit T. En réponse à : Lévitation électromagnétique
En réponse à : Lévitation électromagnétique
Bonjour, il y a deux ans, j’étais à ta place ! Ca va être dur de répondre à tes questions vu que tu n’en a pas posé. Mais bien sur qu’il m’est possible de te donner de plus amples infos... ca remonte un peu maintenant, mais je peux essayer.Je pense avoir encore tous mes documents de l’époque sur ce projet. Etant donné qu’on est encore en septembre, j’ose imaginer que tu sais à peine quelle forme donner à ton Tipe ? Les 2 articles de pobot que j’ai réalisé résument mon année de travail et devraient te permettre de trouver des pistes de recherche. Pour la puissance... il me semble que c’est P=U*I non ? quelle que soit la taille de ta bobine... Pour ma part, j’ai récuperé une bobine dans une méga enceinte. Je l’ai enroulé autour d’un fer doux et puis voilà. J’ai commencé la théorie à partir du moment ou j’avais ma bobine, pas avant. Comme par exemple déterminer la puissance maximale qu’elle pouvait supporter, le courant dont j’avais besoin pour l’induction, et ensuite la tension pour y parvenir. Mais tout cela dépend de ton projet. Le seul conseil que je peux te donner... passe à l’action rapidement... et improvise ! commence par exemple par acheter une carte entrée/sortie et apprendre les bases du codage sur cette carte... arduino, lego, rasperry. Petit à petit tu obtiendras le matos dont tu as besoin pour réaliser ton projet en mécatronique... et pourras prétendre à un tipe plus que correct !
Répondre à ce message