PoBot
PoBot
 Les moteurs électriques expliqués
Les moteurs électriques expliquésLes moteurs électriques sont indispensables en robotique mobile, car c’est le moyen le plus simple pour faire avancer une mécanique (pas l’unique, on peut utiliser des élastiques, des muscles en alliage à mémoire de forme, ... mais la plus simple).
Mais on les connait souvent peu, car par manque de temps ou par économie et bien sûr par manque de connaissances, on choisit souvent le premier disponible ou le moins cher. Comme on peut trouver facilement des circuits électroniques tout intégrés pour les commander, on ne réalise pas qu’il y a des problèmes de consommation, de couple, de vitesse, qui conduisent à un robot peu performant, peu autonome.
Depuis nos débuts, nous avons la chance de compter parmi nous des spécialistes qui nous ont expliqué les différents moteurs électriques, et nous ont donné l’envie d’aller plus loin et de tester de nouveaux moteurs et d’améliorer nos performances en apprenant à les contrôler correctement.
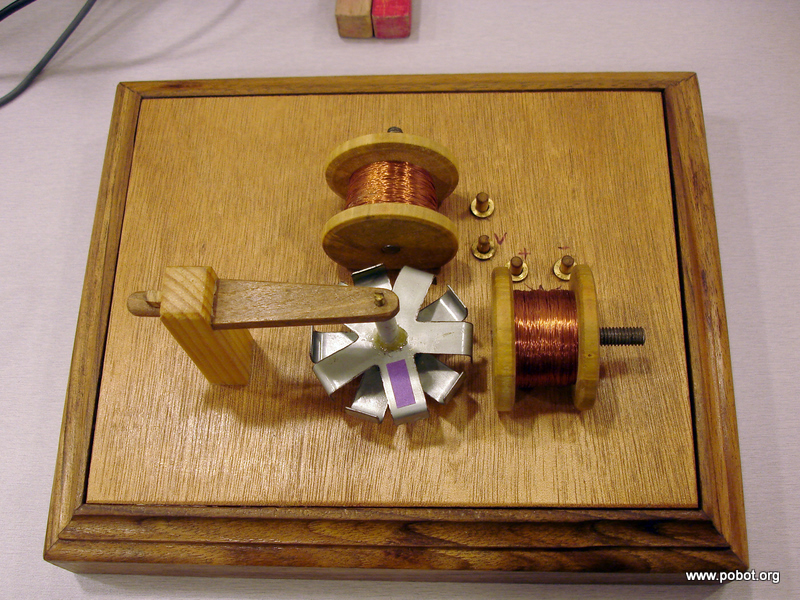
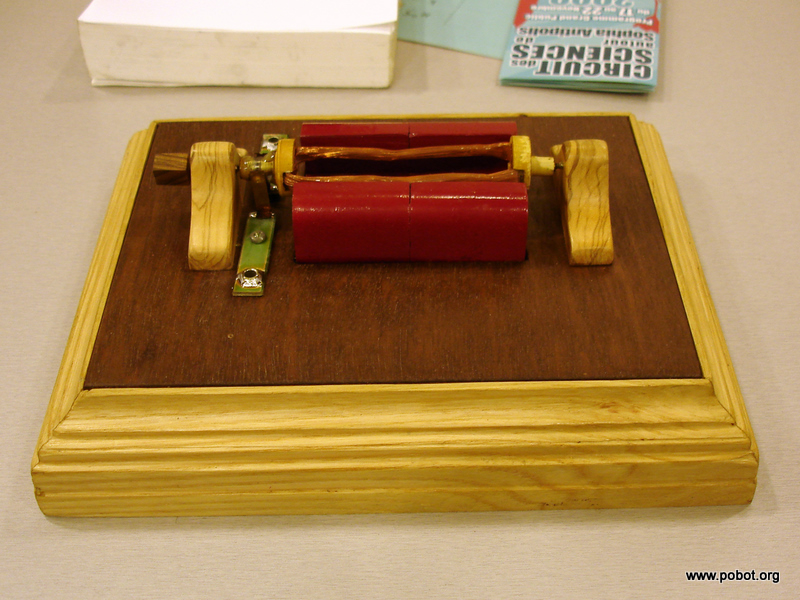
Cette page est là aussi pour rendre hommage aux montages d’Henri qui depuis de nombreuses années réalise ces moteurs électriques et anime avec enthousiasme et pédagogie les présentations publiques. Il a d’ailleurs fait la démonstration d’un troisième moteur en octobre 2010 pour la Fête de la Science.
Différents types
Pour la robotique ludique, on distingue différents moteurs électriques :
– les moteurs à courant continu (à balais, ou "brushed DC") ou motoréducteurs
– les moteurs à courant continu sans balais (ou "brushless DC")
– les moteurs pas-à-pas (ou "stepper motor")
– les servomoteurs (généralement de modélisme)
A noter que cette liste donne une catégorisation pour le grand public et les amateurs, car certains pros feraient la remarque qu’un moteur pas-à-pas est aussi un moteur sans balais. Ce qui nous intéresse, c’est plus les différences que les points communs, d’où cette répartition.
Cette étude n’aurait pas vu le jour sans l’expérience, la pédagogie et le savoir-faire d’Henri, qui participe aux projets et aux événements de Pobot depuis plusieurs années et a réalisé de petits bijoux de démonstrateurs pour expliquer les différents moteurs électriques :
Nous sommes aidés dans nos études par un livre de référence : "Moteurs électriques pour la robotique" de Pierre Mayé (Editions Dunod).
Une société qui conçoit, fabrique et commercialise des moteurs miniatures pour l’industrie nous apporte son soutien, avec des explications techniques, un catalogue détaillé et bien sûr quelques uns de leurs moteurs : Portescap, a Danaher Motion Company.
Merci à eux !
Le moteur à courant continu
Le moteur pas à pas