 PoBot
PoBot
 Le treuil (suite)
Le treuil (suite)Dans l’article précédent nous avions presque terminé le treuil. Il y manquait cependant les sécurités de fin de course, permettant d’arrêter le moteur lorsqu’une des extrémités du câble est atteinte, et d’interdire le sens de rotation correspondant tant qu’on se trouve dans cette situation.
Ces sécurités sont en effet importantes, car lorsque le radeau est en navigation, il est impossible de voir ce qui se passe à bord, et les manipulations du treuil sont donc faites en aveugle. Or il est toujours préférable de ne pas faire forcer une mécanique si on veut qu’elle dure ;)
Première tentative
Comme il faut bien prendre les problèmes dans l’ordre, on s’attaque en premier à la sécurité lorsque le câble est complètement remonté. L’idée qui vient à l’esprit par défaut est que le boîtier de la sonde vienne actionner une palette articulée lorsqu’il arrive en haut, cette palette déclenchant un interrupteur. Ce sera un contact ILS comme pour la mesure de la longueur de câble, afin que tout cela reste étanche à l’eau.
La palette est découpée comme d’habitude dans un couvercle de goulotte électrique, et son support dans une PADV. Les dimensions de la fenêtre sont telles que :
– il soit possible de faire passer le connecteur du câble lorsqu’on installe la sonde
– le simple passage du câble ne suffise pas à actionner la palette
– la sonde (ou un autre objet fixé au câble) actionne la palette
Ca donne ceci une fois en place :

Il ne reste plus qu’à fixer un aimant au niveau de l’extrémité mobile, et placer l’ILS en regard.
Maintenant qu’on s’est occupé de celui-ci, que fait-on pour l’autre extrémité ? Le problème est un peu plus complexe car :
– nous n’avons pas de corps volumineux qui ferait office de butée comme c’est le cas avec la sonde
– le câble vient d’un peu toutes les directions (cf la vidéo de l’article précédent), et il ne faut pas qu’il déclenche le détecteur hors de propos
Après avoir retourné le problème dans tous les sens, il faut se rendre à l’évidence qu’il n’y a pas de solution satisfaisante avec le même type de mécanisme.
Nouvelle approche
Ayant eu l’occasion de faire des tests de portée des ILS dans le cadre de mon travail, j’ai pu constater qu’avec l’aimant approprié, on atteint une distance de déclenchement voisine de 20 mm. Or l’espace à l’intérieur du treuil fait moins de 30 mm. De plus, lorsqu’on s’approche du galet entraîneur, le câble est à une position quasi fixe.
Et si on plaçait un ILS sur la face interne du bâti du treuil, dans l’alignement du câble lorsqu’il s’approche du galet entraîneur ? Il n’y a plus qu’à fixer un aimant sur le câble à la position voulue pour que nous obtenions notre détection sans aucun contact mécanique.
C’est parti pour une série de tests...
L’aimant utilisé mesure 18mm de long pour un diamètre de 4mm. On peut le fixer au câble avec un simple morceau d’adhésif résistant à l’eau (style Gaffer comme d’hab).
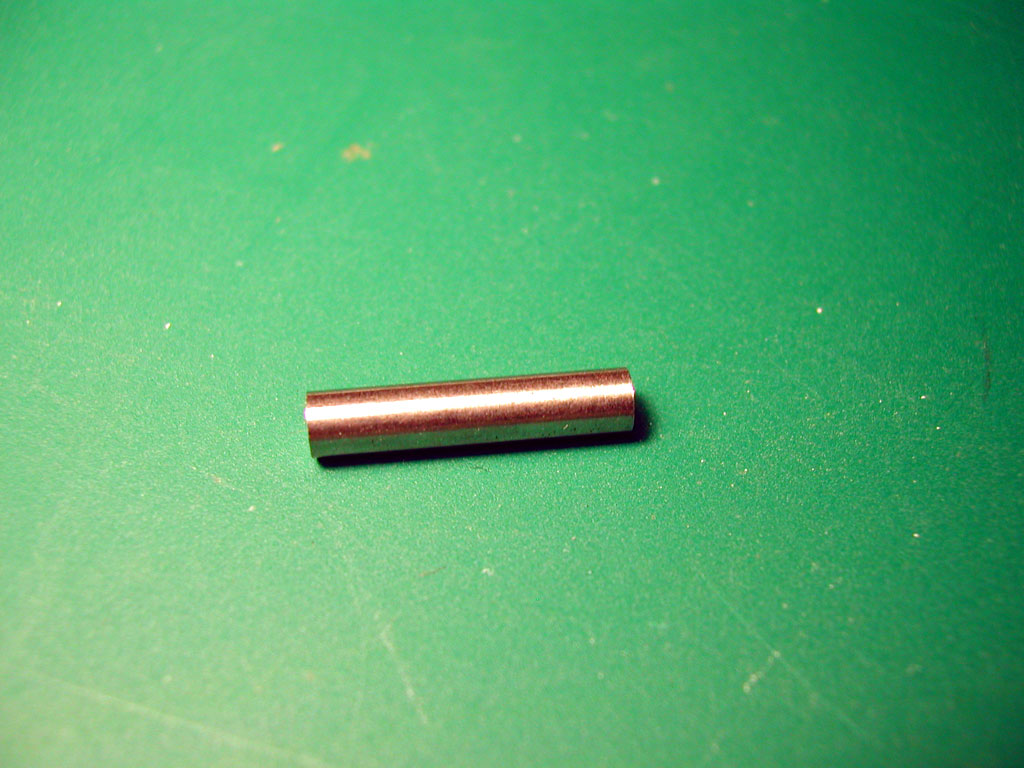
Aimant miniature
| 
Câble équipé
|
La série de manips effectuées semble montrer que ça fonctionne très bien, y compris lorsque l’aimant est présenté à des positions improbables.
C’est vendu. Pour augmenter la fiabilité, on placera le même système sur les deux faces internes du treuil, les ILS en vis à vis étant connectés en parallèle. Du coup la distance maximale aimant / ILS n’est plus que de la moitié de l’espace interne, ce qui est donc largement dans la plage de détection constatée. Si en plus on fixe non pas un, mais deux aimants sur le câble, nous devrions être à l’abri de tout problème.
Comme rien ne nous empêche d’appliquer le même principe pour le cas que nous avions traité avec le mécanisme de palette, la décision est prise de remplacer celui-ci par la même combinaison d’ILS. Le résultat n’en sera que plus fiable et moins fragile car on élimine du coup toutes les pièces mobiles.
Les deux ILS de chaque côté sont montés sur un circuit imprimé, et les logements correspondants sont usinés dans les flancs du bâti :
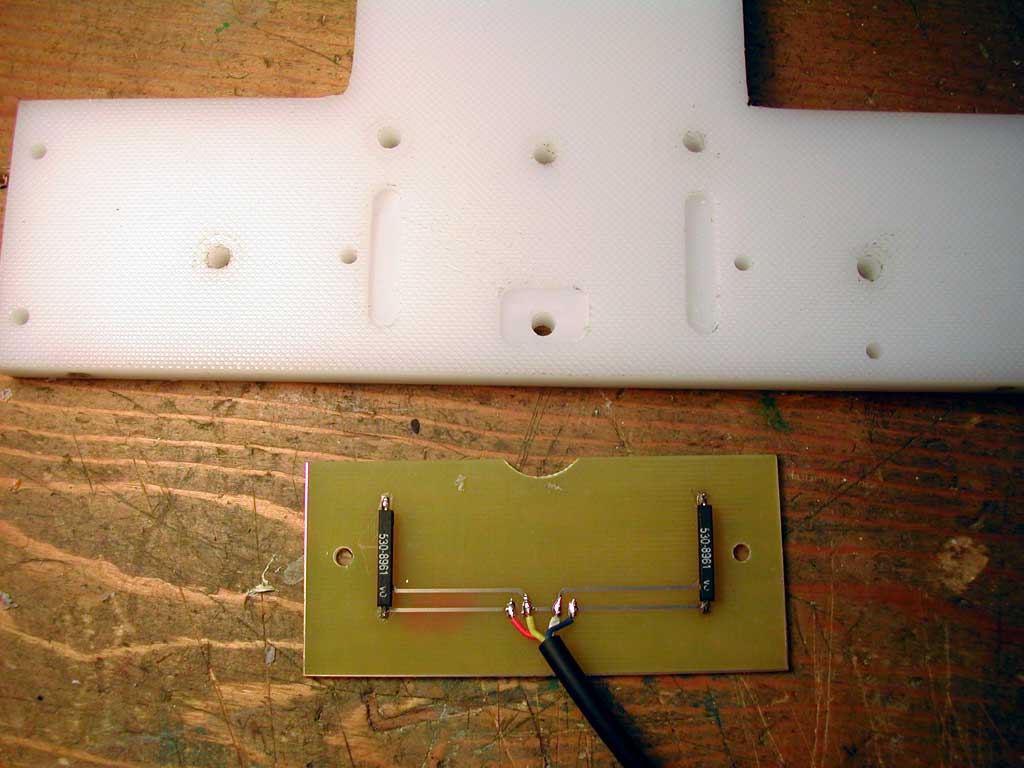
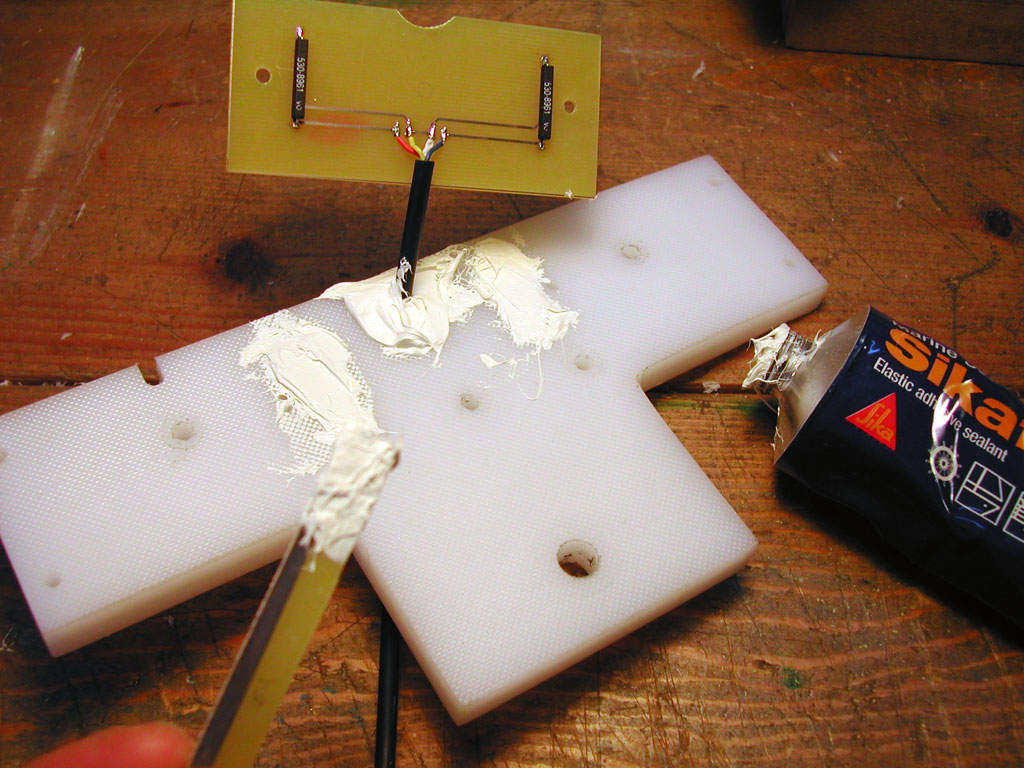
Après copieux bourrage au mastic silicone, les circuits sont mis en place :
Etanchéité avant pose
| 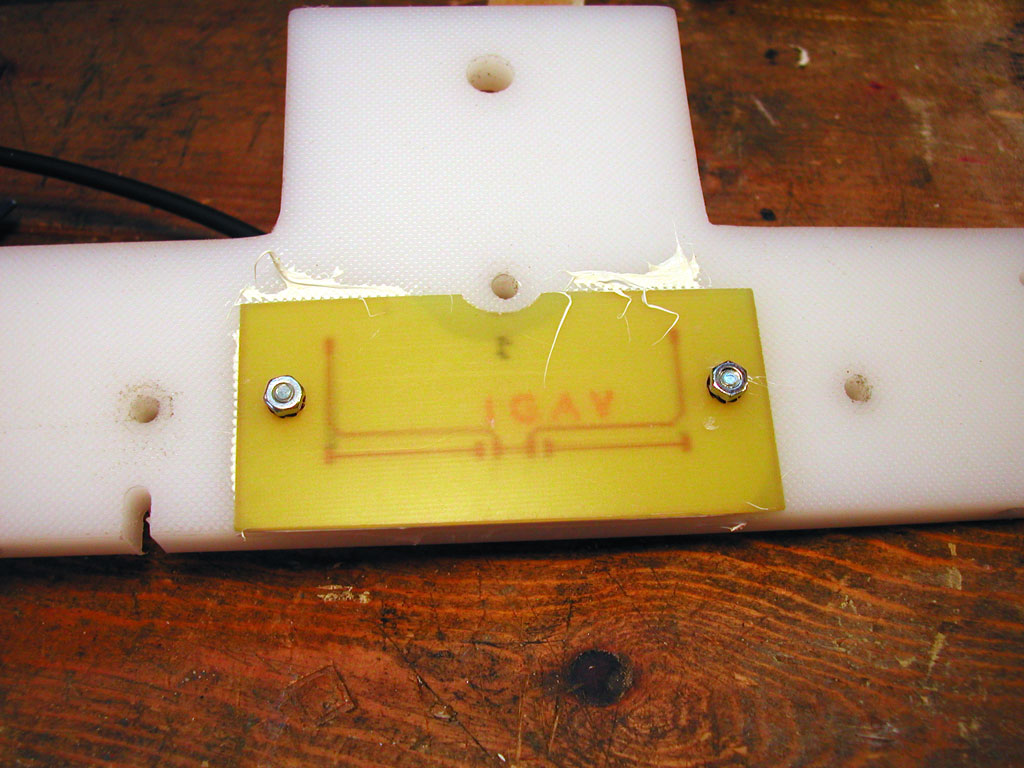
Fins de course en place
|
Je vous rassure, les débordements de mastic ont été nettoyés après séchage.
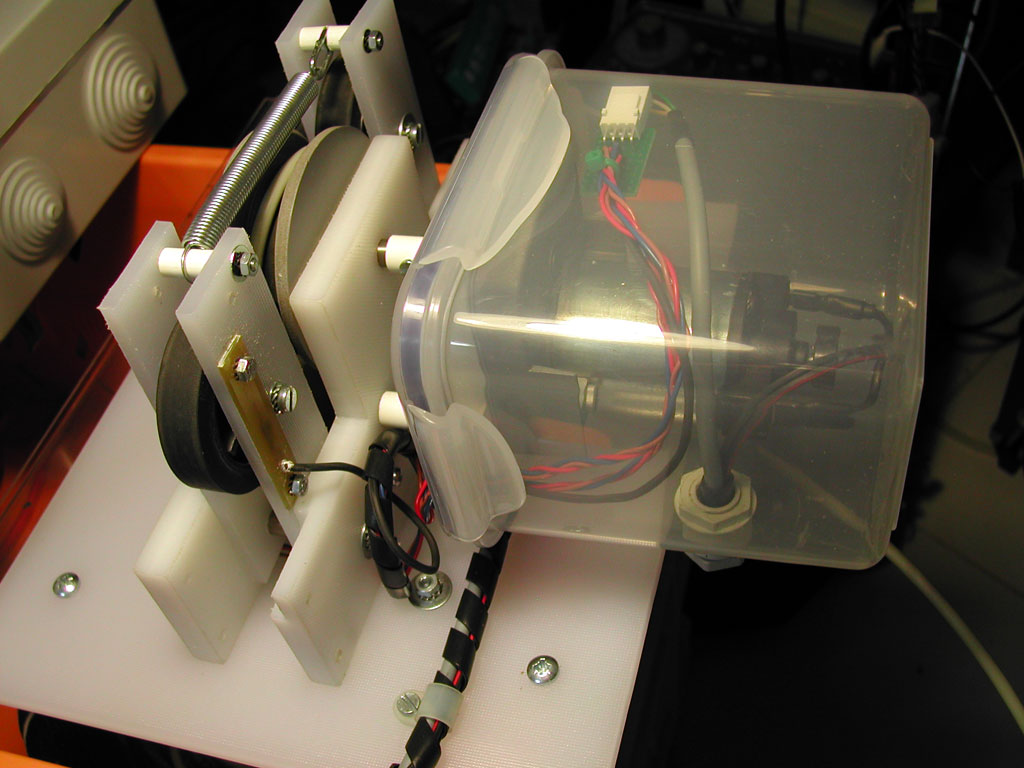
Voici le résultat une fois l’ensemble complètement remonté :
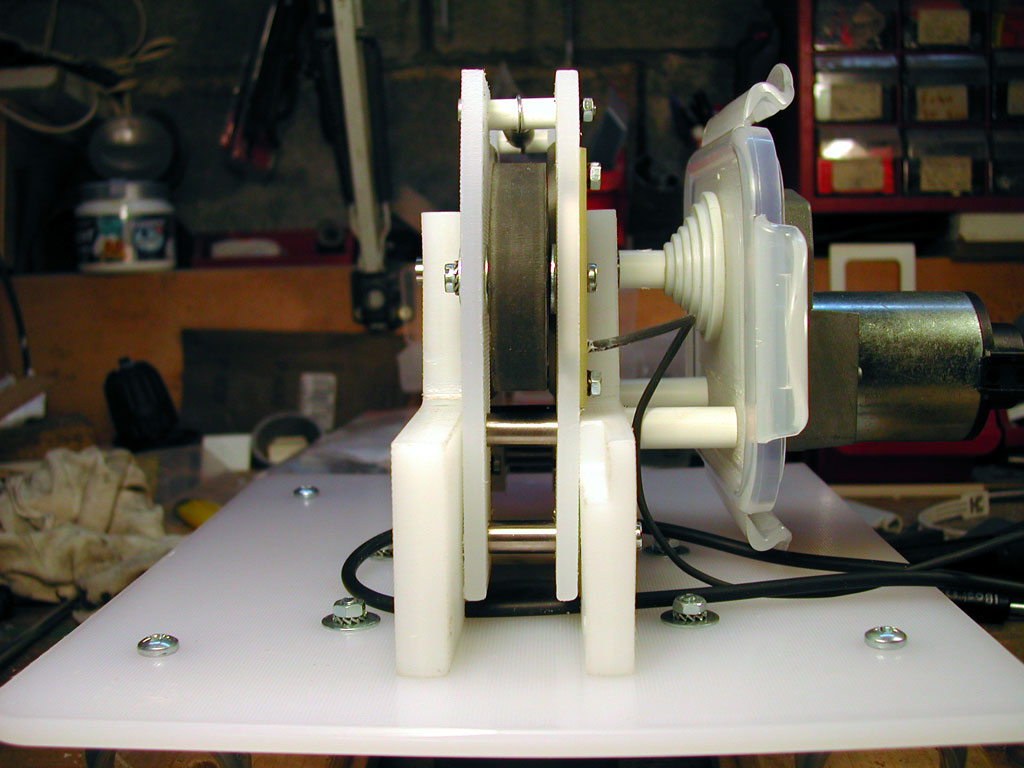
Treuil de profil
| 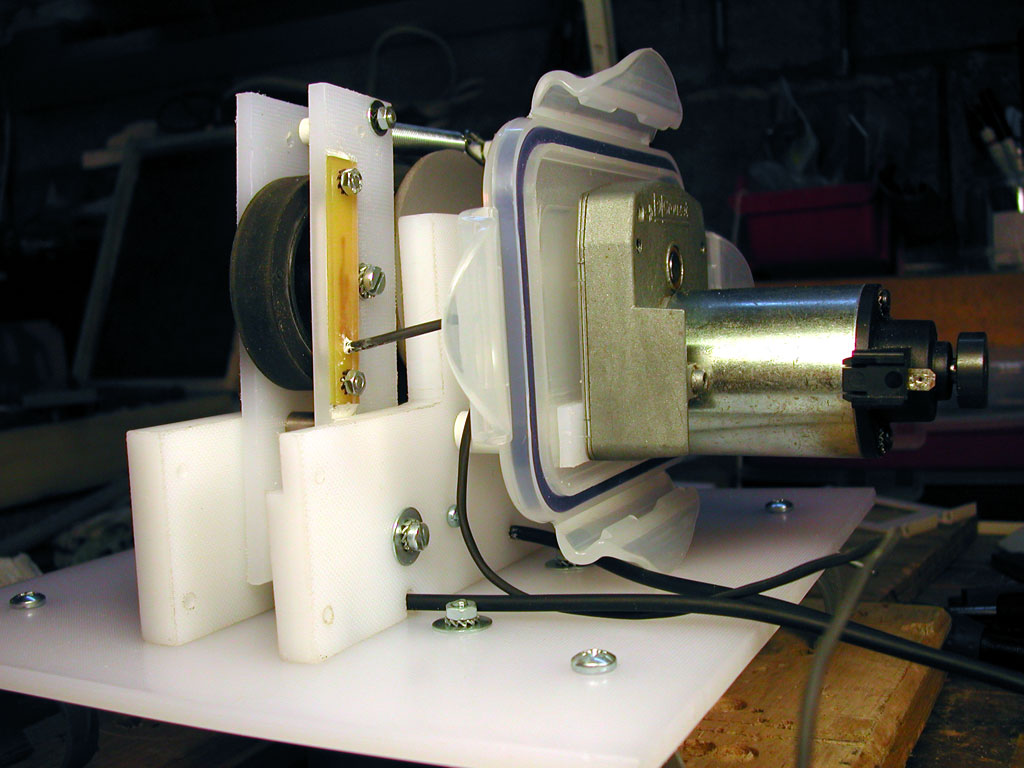
Treuil de 3/4
|
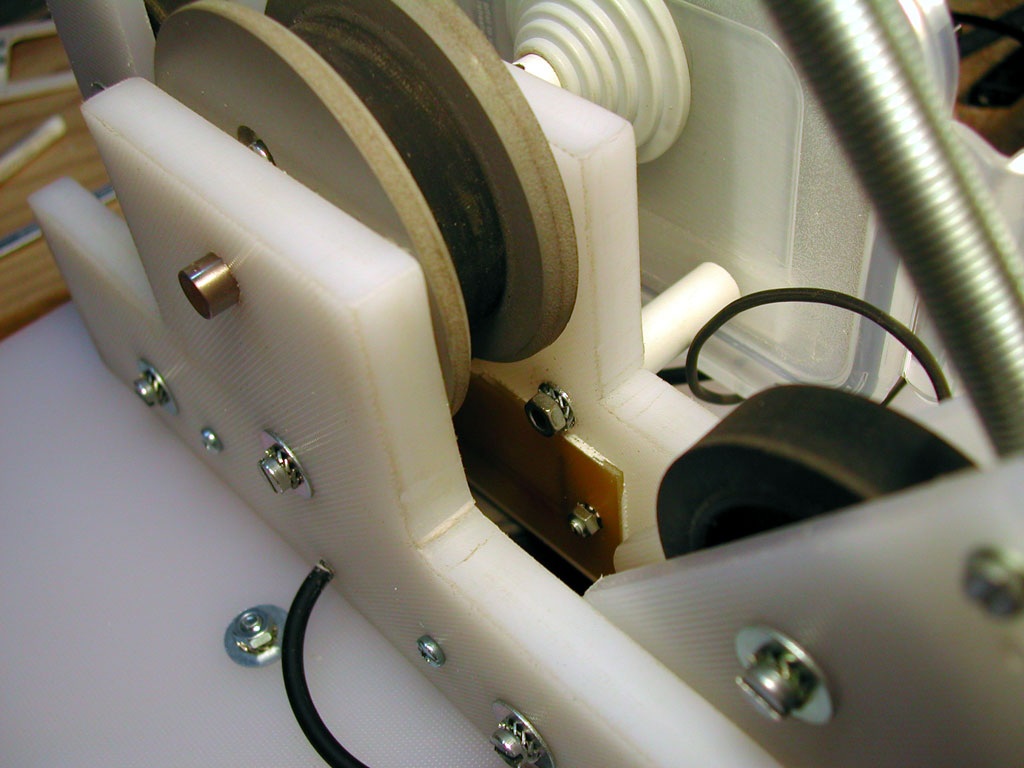
Intérieur du treuil
| |
Câblage final
Il faut raccorder tout cela au niveau du boîtier du moteur, et y faire arriver également le câble reliant le treuil au boîtier de contrôle. Ce n’est pas le plus compliqué.
Pour faire propre un petit connecteur a été réalisé. On notera également le presse-étoupe pour éviter les remontées d’eau au passage de la paroi du boîtier, ainsi que le collier solidarisant le câble de raccordement à la platine. On n’est jamais trop prudent et il vaut mieux éviter qu’une traction brutale sur celui-ci ne vienne détériorer quelque chose. N’oublions pas que cet engin va être utilisé par des non-spécialistes ne l’ayant pas fabriqué, et également par de jeunes expérimentateurs bourrés d’énergie.
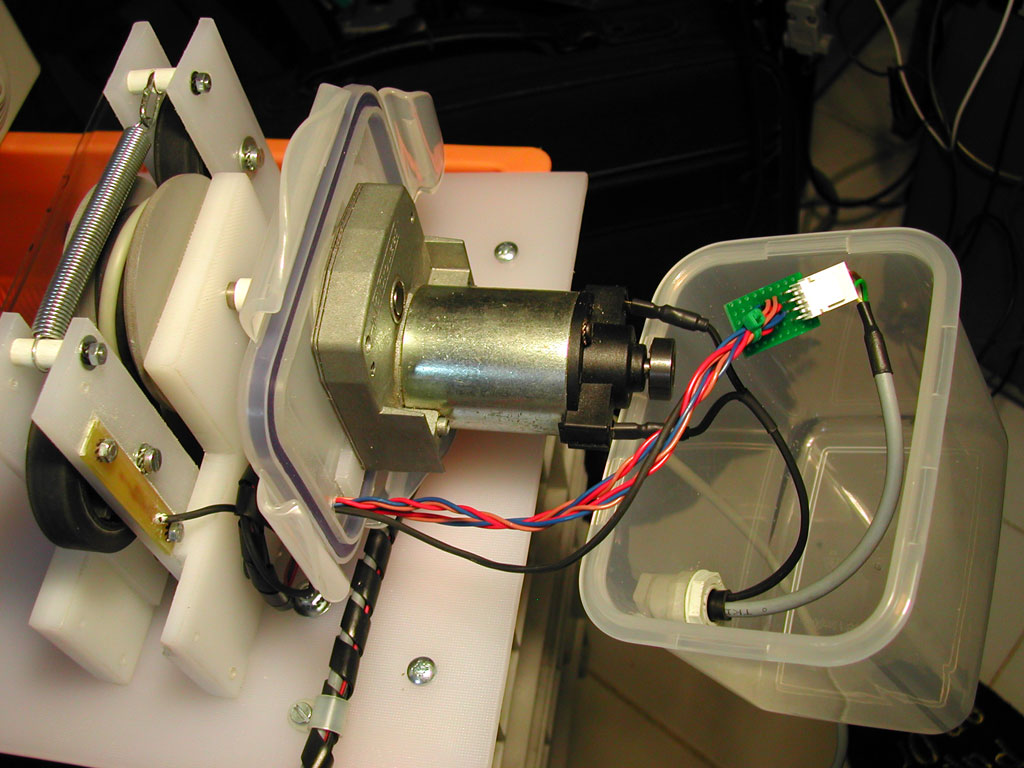
Câblage treuil
| 
Treuil terminé
|
Finition du panier à câble
Pour que notre panier en nasse à poisson ait les bonnes dimensions, le filet a été retroussé pour en réduire la profondeur. Il est immobilisé à sa place par une couture maison faite avec une simple garcette. Je ne risque pas de me faire embaucher chez Yves Saint-Laurent avec ce type de travail, mais de toute manière je n’avais pas l’intention de postuler.

Le panier est fixé aux longerons du pont avec deux petits sandows, ce qui permet de le placer à volonté.

Les tests
Un banc de test est bricolé en empilant des bacs en plastique.
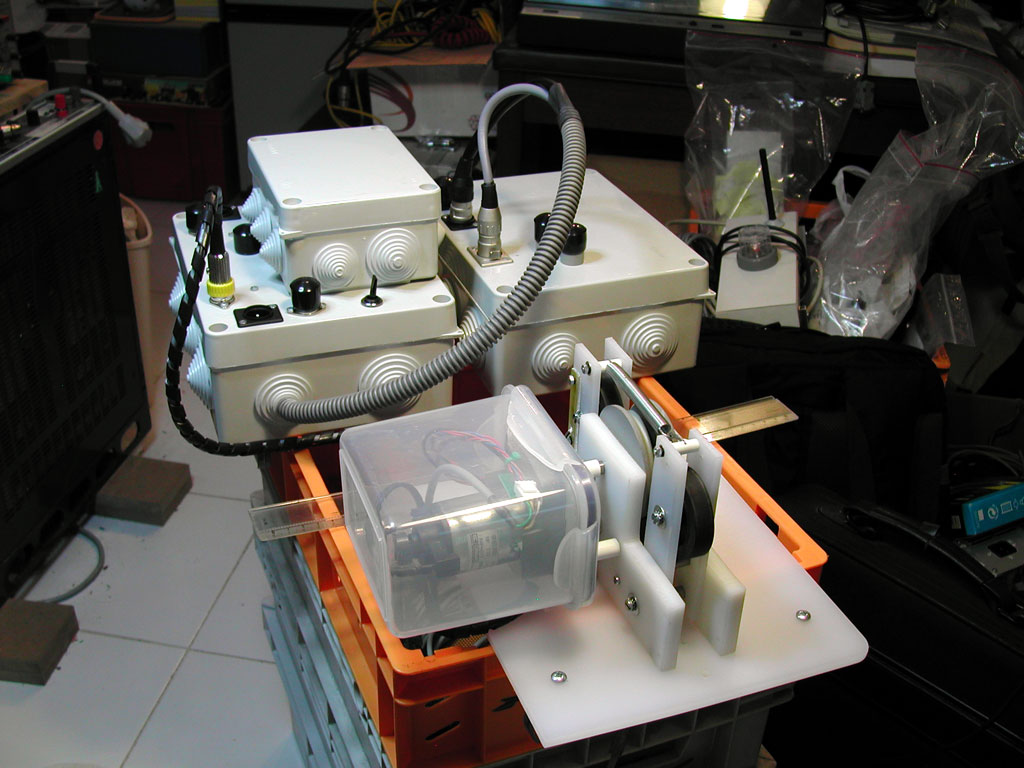
Le boîtier de contrôle est relié directement au PC via un câble approprié (histoire de s’éviter de devoir installer les boîtiers radio aussi). Et c’est parti pour un série de déroulements et d’enroulements du câble afin de s’assurer que le moteur s’arrête bien immédiatement lorsque l’aimant passe devant les capteurs. Aucun problème, le temps de réaction est quasi nul. Et en plus le tableau de bord nous signale la situation d’une manière absolument sans équivoque :
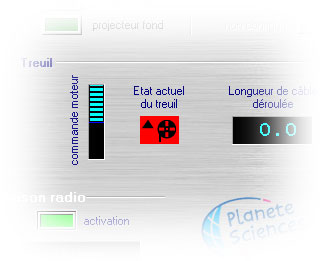
Au passage on a vérifié que l’indicateur de la longueur déroulée nous fournissait la bonne information, une fois le logiciel de contrôle paramétré avec la longueur correspondant à l’intervalle entre deux signaux du capteur.
The end
Et voilà, notre treuil est terminé pour de bon cette fois-ci (dit-il en touchant la planche en bois de son bureau)




