 PoBot
PoBot
 Fabrication des pieds de R2-D2
Fabrication des pieds de R2-D2Cet article présente la fabrication de la coque qui recouvre chacun des trois pieds, mais aussi des plates-formes intérieures qui soutiennent les roues et les moteurs. Il présente des astuces mécaniques qui nécessitent des connaissances en robotique, notamment les contraintes de poids, de couple et de vitesse et leurs effets sur les frottements et les glissements.
La coque
Le moule a été réalisé en polystyrène extrudé (disponible en grande surface de bricolage par couches de 6 centimètres d’épaisseur). Le bloc a été découpé par une fraiseuse numérique CNC grâce à un plan réalisé sous Galaad, un logiciel de conception en 2D générant les pentes et les courbes nécessaires pour recréer un pied fidèle à l’original.
Le moule a été ensuite recouvert de fibre de verre et de résine polyester (disponible en magasin spécialisé, Picard dans notre cas). C’est une étape délicate parce qu’il faut un bon dosage, une température adaptée (nous sommes en plein été sur la Côte d’Azur) et un temps de séchage adéquat.
Pour l’instant, on garde le mystère sur les photos... parce qu’on en a pas encore pris :)
Le support des roues
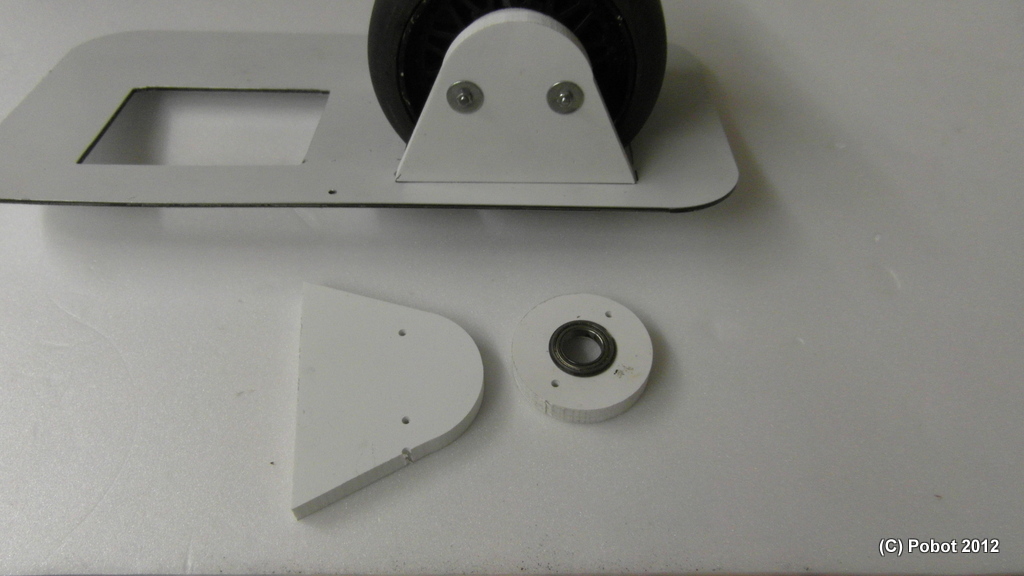
Sous la coque, on placera une grande plaque de panneau sandwich à parement aluminium (Alucobond) découpée pour s’insérer parfaitement et à bonne hauteur.
Les dimensions sont conséquentes : 16 x 34 centimètres.
Elle est percée de trous pour laisser dépasser la bande de roulement des deux roues.
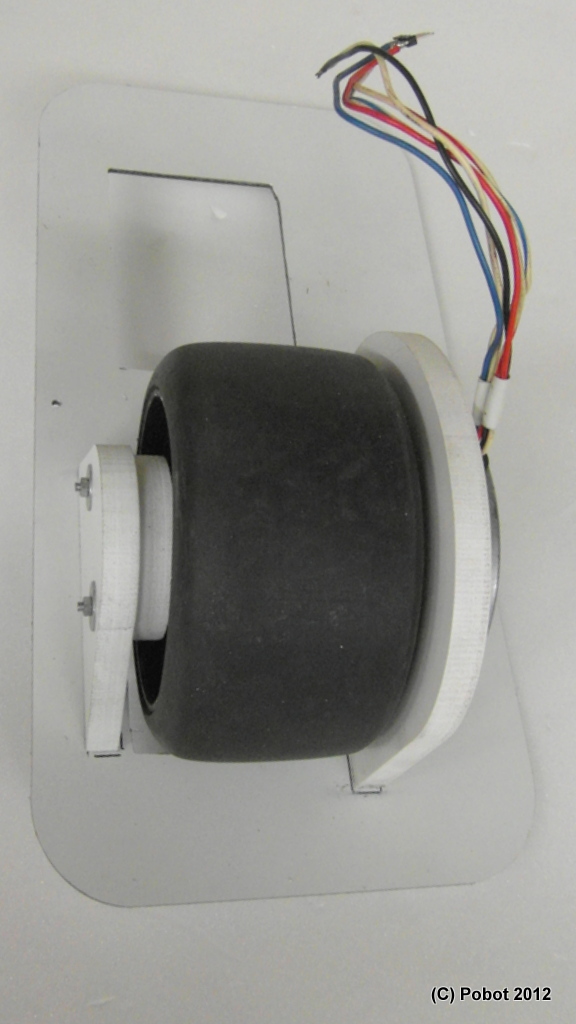
On place une roue motrice en avant, suivie d’une seconde roue identique.
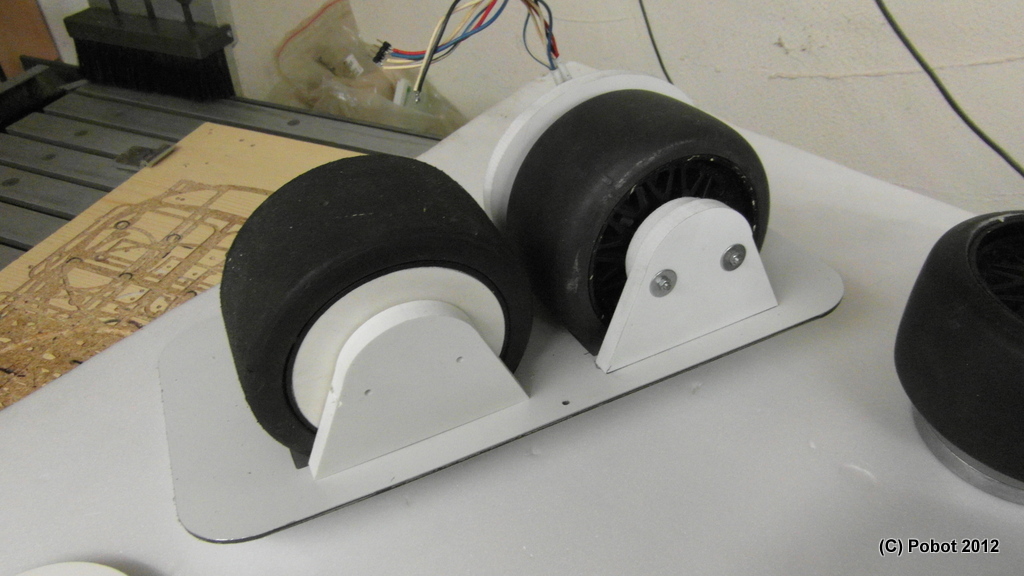
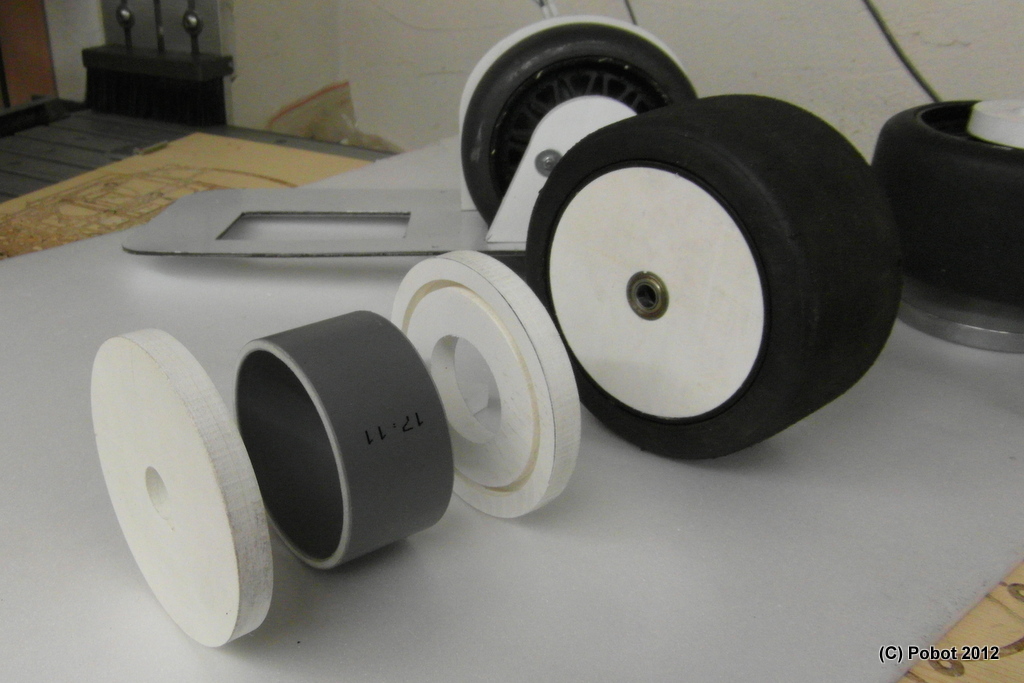
Quasiment tout le matériel est récupéré : les roues sont prises sur un modèle réduit de camion. Comme R2-D2 a trois pieds, il faut 6 roues.
Mais contrairement à un modèle réduit, les roues ne seront pas de chaque côté d’un essieu : l’effort de soutien du poids du robot va donc être sur chacune des roues, avec un risque de déformation de la jante qui n’est pas soutenue à chaque extrémité de la roue. Il a donc fallu réaliser des pièces (en PVC extrudé) pour combler exactement le diamètre de chacune des parties. Pour renforcer la jante, un tube de conduite PVC a été découpé et s’insère dans une fente.
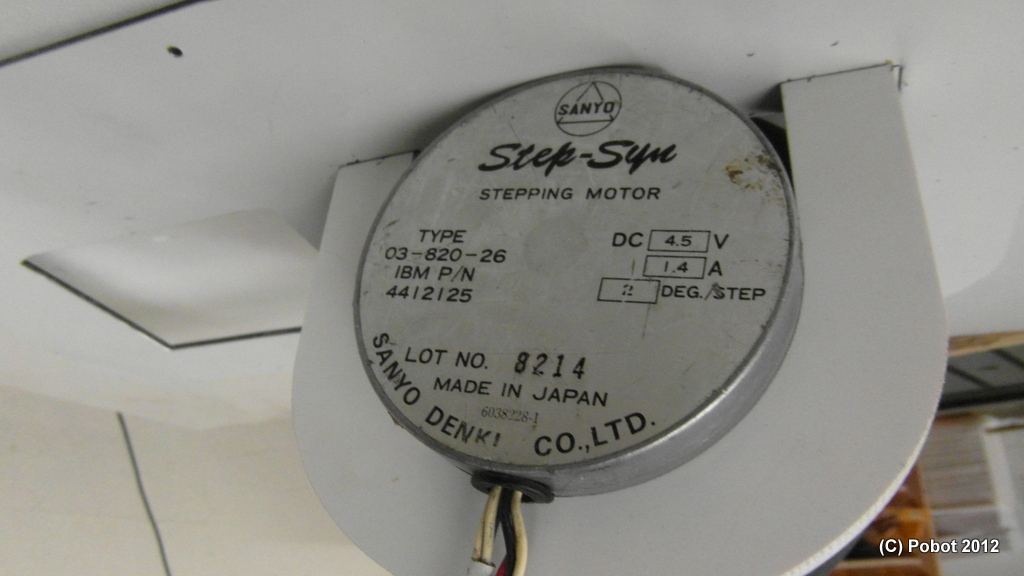
Les moteurs seront décrits plus en détail dans un article dédié à la motorisation. Pour la construction des pieds, nous avons mis du temps à trouver la paire de moteurs idéale : ceux qui ont été finalement choisi ont le bon goût de s’intégrer exactement dans la jante des roues, ce qui permet un gain de place énorme !
De l’autre côté de la jante, l’axe de rotation de la roue motrice sera soutenu par un roulement à billes (de récupération également, merci les imprimantes jetées)
Astuce technique
L’axe de rotation sera placé au milieu de l’alignement des deux roues motrice. Le troisième pied devra être équipé d’un système de rotation libre, pour limiter les glissements.
Il faut par contre trouver une solution pour les roues libres derrière les roues motrices.
La solution est de leur laisser une marge de manœuvre de chaque côté, leur permettant de pivoter sur leur axe et de suivre la courbure réalisée par la rotation du robot.

En toute logique, l’angle maximum correspond à une rotation du robot sur lui-même, quand la même vitesse est donnée aux deux moteurs mais dans des directions opposées.
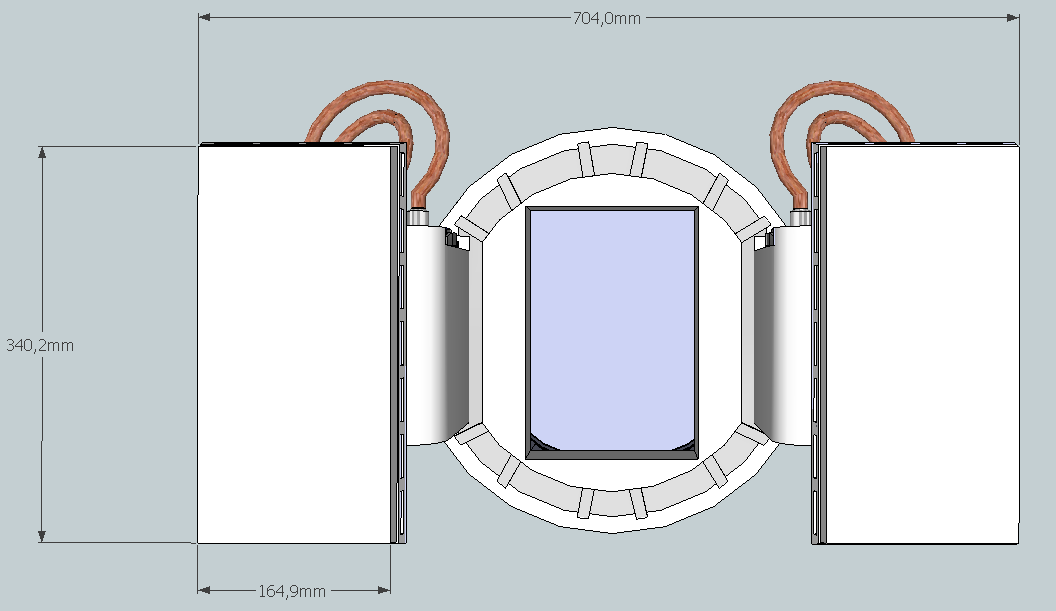
Compte-tenu des dimensions (schéma ci-dessus), les roues motrices vont parcourir un cercle de 54 centimètres de diamètre, soit 170 centimètres de périmètre.
Les roues sont séparées de 17 centimètres, donc l’angle de rotation maximum de la roue libre sera de 36 degrés. Il faudra donc un rail de 72 degrés d’ouverture de chaque côté de la roue libre pour supporter les roulements qui lui permettront de tourner tout en pivotant.
Des tests seront faits directement sur les roues une fois construites pour déterminer s’il faut accompagner ce pivotement par des ressorts de rappel. Le pire cas n’est pas envisagé : ce serait de commander cette rotation par un moteur. Autant préférer le glissement du pneu et compter sur une odométrie indépendante pour récupérer la position du robot.
N’oubliez pas de venir régulièrement sur notre site web pour découvrir l’avancement de la réalisation, et participez à ce projet, ouvert à tous ! Même les plus petites contributions sont les bienvenues ! Ne serait-ce qu’un mail d’encouragement.






Vos commentaires
# Le 10 septembre 2012 à 20:09, par guy ferey En réponse à : Fabrication des pieds de R2-D2
En réponse à : Fabrication des pieds de R2-D2
bonjour
excellent travail
je commence aujourd’hui la "creation" d’un R2D2
je suis votre parcours
merci a vous
guy
Répondre à ce message