 PoBot
PoBot
 Engrenages ou courroie crantée ?
Engrenages ou courroie crantée ?Le choix d’une transmission mécanique pour les robots mobiles se partage entre les engrenages et les courroies crantées.
Il y a plusieurs raisons à leur utilisation (que ce soit l’un ou l’autre) :
– apporter le mouvement d’un moteur jusqu’aux roues pour des raisons de place : s’il n’y a pas de connexion directe possible à cause de l’encombrement des moteurs ou des possibilités de fixation, par exemple si vous choisissez de conserver un essieu continu entre deux roues motrices.
– transformer le mouvement pour adapter la vitesse efficace du moteur à la vitesse souhaitée du robot. Voir nos articles sur les moteurs : ils ne peuvent pas toujours fonctionner correctement aux vitesses basses.
– transformer le mouvement pour obtenir un couple plus important : même si le moteur peut tourner lentement, le couple peut ne pas être suffisant. Selon le type de moteur, utiliser une transmission en réduction pour utiliser une vitesse supérieure du moteur peut apporter plus de puissance.

Il faut bien analyser vos besoins et vos contraintes pour pouvoir prendre une décision. Nous vous fournissons ci-dessous certains arguments pour ou contre issus de nos différentes expériences.
Les avis ne sont peut être pas unanimes et ce n’est pas notre façon de travailler que de faire un choix unique. A votre tour, partagez vos arguments et nous compléterons cet article.
Les engrenages
Ils sont les plus répandus dans les robots du commerce... ce qui ne signifie pas que c’est le choix le plus évident pour un robot amateur. A vous de bien analyser votre situation.

Les avantages
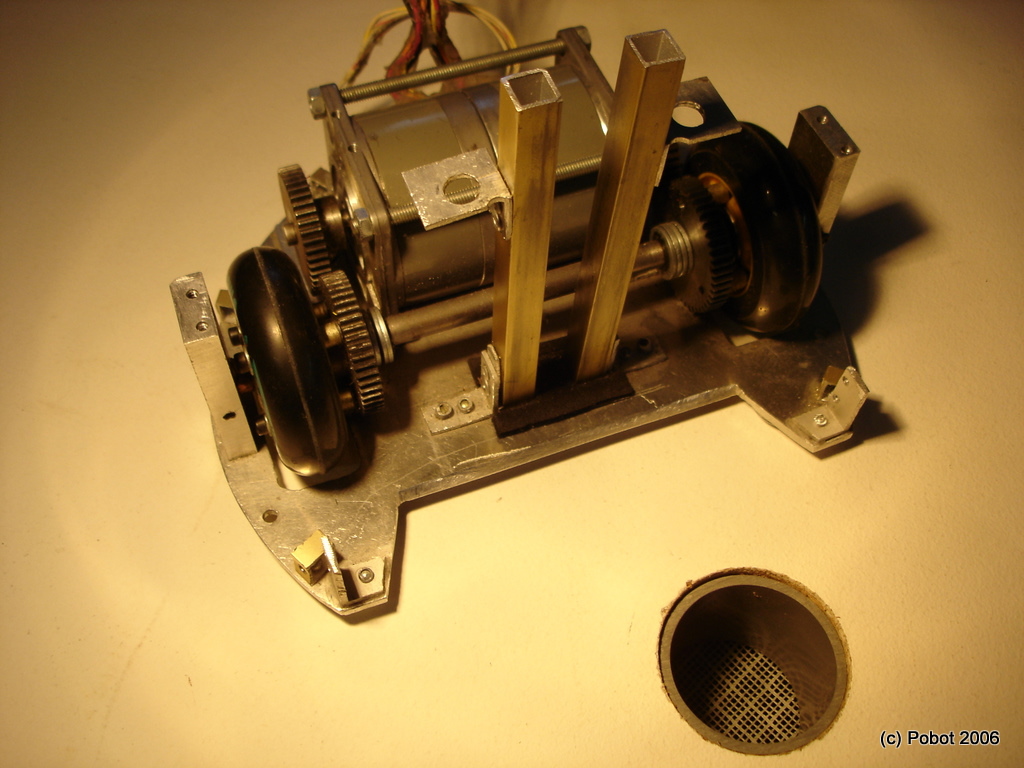
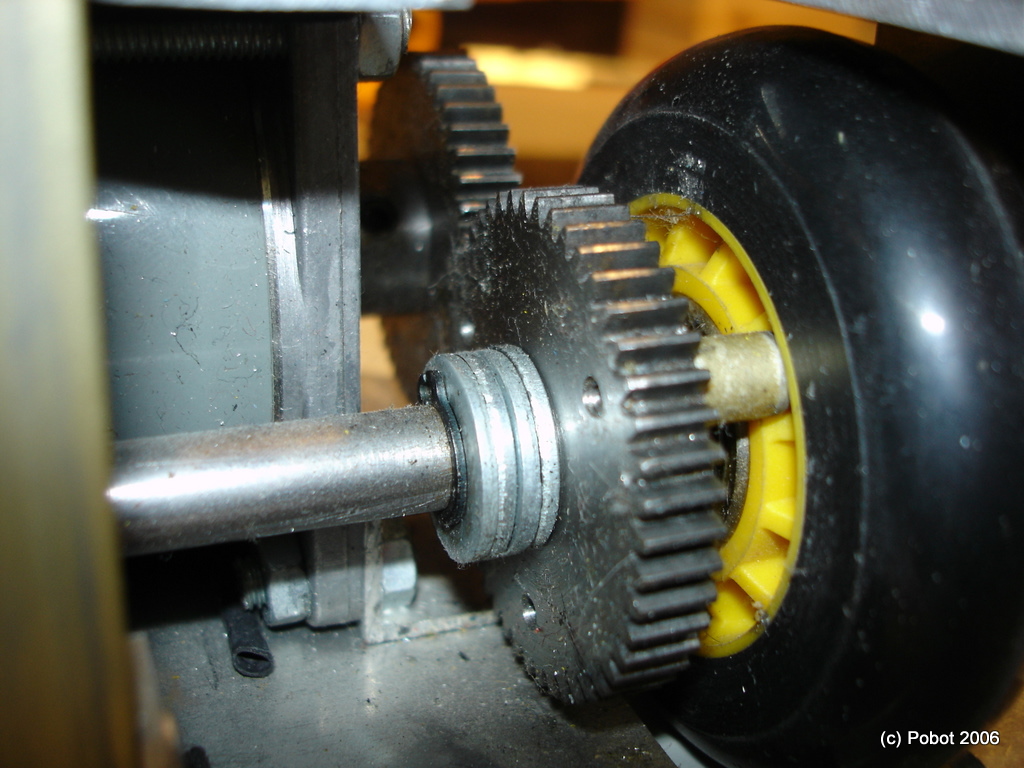
Il y a une grande variété d’engrenages : c’est un avantage puisqu’on peut plus facilement adapter sa transmission, en faisant varier le nombre de dents des engrenages et obtenir une réduction ou une amplification de la vitesse du moteur.
Chaque engrenage peut être mis en contact avec d’autres engrenages en même temps, permettant de réaliser des réductions plus importantes en les combinant.
Le peu de place nécessaire est également un atout, puisque chaque engrenage est directement en contact avec le suivant, et que de nombreux modèles présentent de tailles d’engrenages sur la même roue, permettant de gagner de la place pour enchainer trois engrenages avec deux rapports de réduction successifs.
Enfin, on trouve facilement des engrenages en démontant des objets cassés (gadgets, jouets, imprimantes).
Les inconvénients
La diversité des modèles et des matériaux peut dérouter : épaisseurs différentes, taille des dents, matière plastique ou métal, le choix n’est pas forcément évident pour un novice.
Les prix sont en rapport avec tous ces choix : on peut être tenté de faire des économies avec un modèle en plastique fin qui peut se révéler trop fragile pour l’usage que vous lui réservez.
Mais l’inconvénient le plus important est sans doute la précision nécessaire au montage : il faut que les engrenages soient très bien alignés, au dixième de millimètre près, et bien sûr avec des axes parallèles et parfaitement centrés.
Les courroies crantées
Deux poulies crantées reliées par une courroie à dents permettent également d’entrainer une roue en transmettant la rotation d’un moteur.
Les avantages
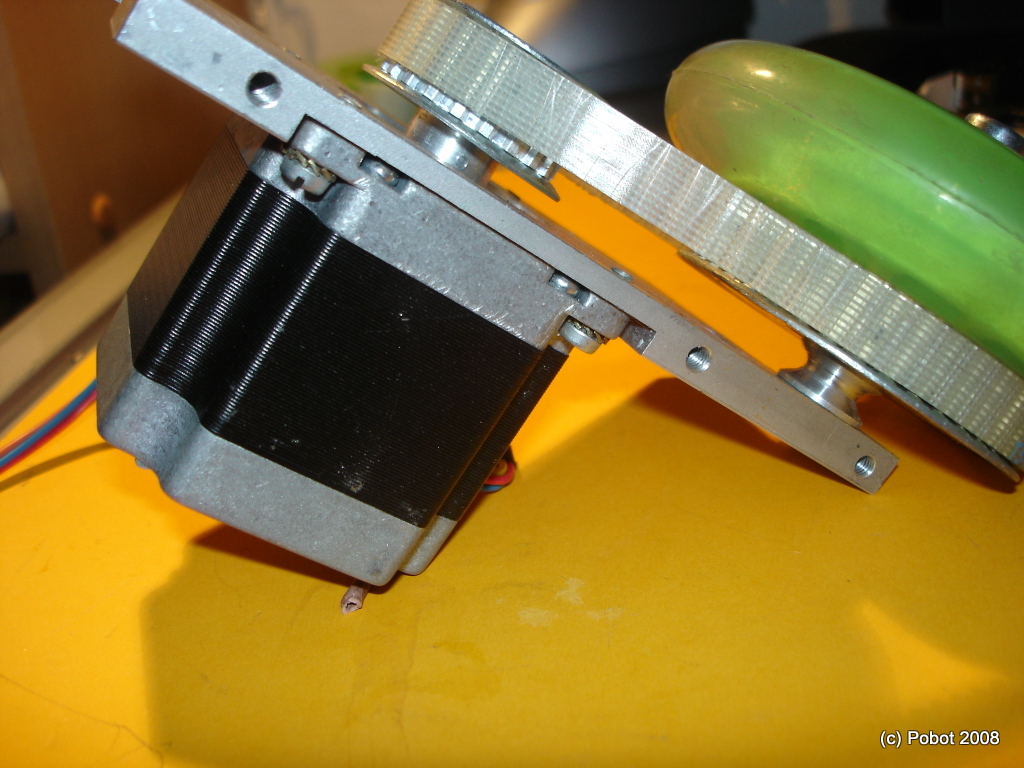
Disons-le tout de suite : cette solution a permis à beaucoup de débutants de faire leur propre robot sans avoir une mécanique très exacte : il y a une marge de manœuvre bien plus importante quant à l’écartement entre les différents axes. En utilisant des tiges filetées et des écrous, on peut ainsi faire varier la distance entre l’axe du moteur et l’axe des roues et régler la tension de la courroie
L’alignement n’est pas nécessaire : on peut ainsi rattraper les imperfections d’une base roulante. Cela parait anodin quand on énumère les éléments qui suffisent à mettre en mouvement un robot : un moteur, une transmission, une roue, un axe. Mais essayez de les fixer les uns aux autres : la majeure partie des problèmes mécaniques sont liés au centrage de la roue sur son axe, et bien sûr rajouter une poulie collée à la roue rajoute un second centrage.
Le coût d’une telle solution est modéré : les poulies en aluminium sont suffisamment résistantes pour un robot de plusieurs kilogrammes. On peut bien sûr recourir à des poulies en acier, bien plus chères.
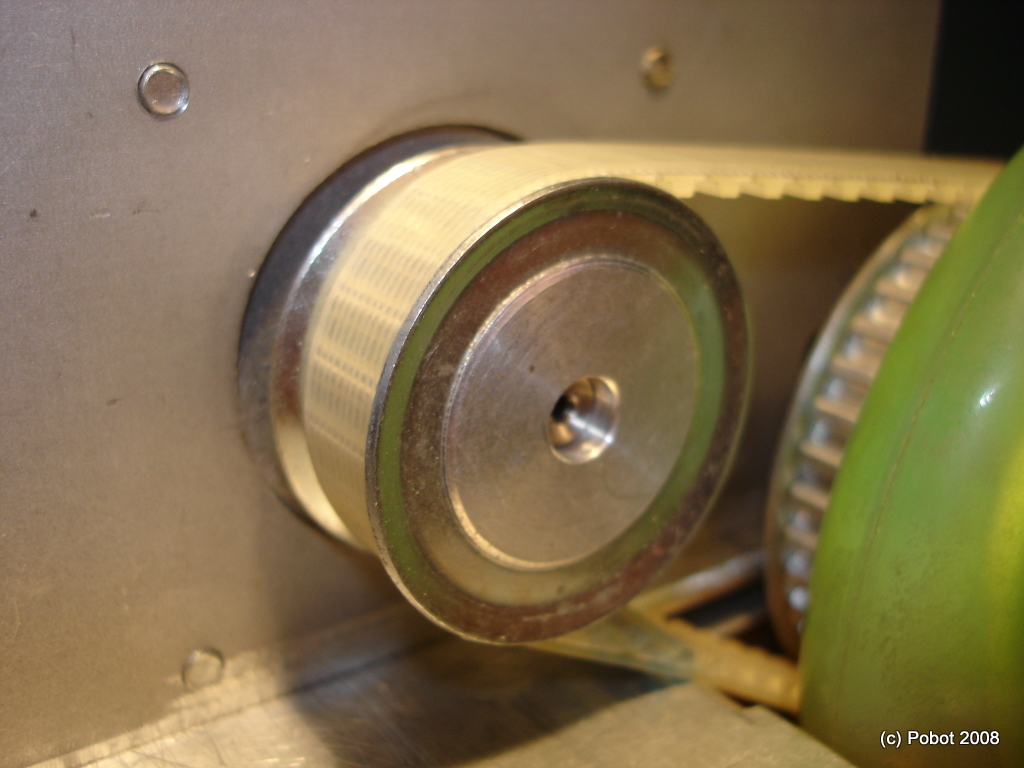
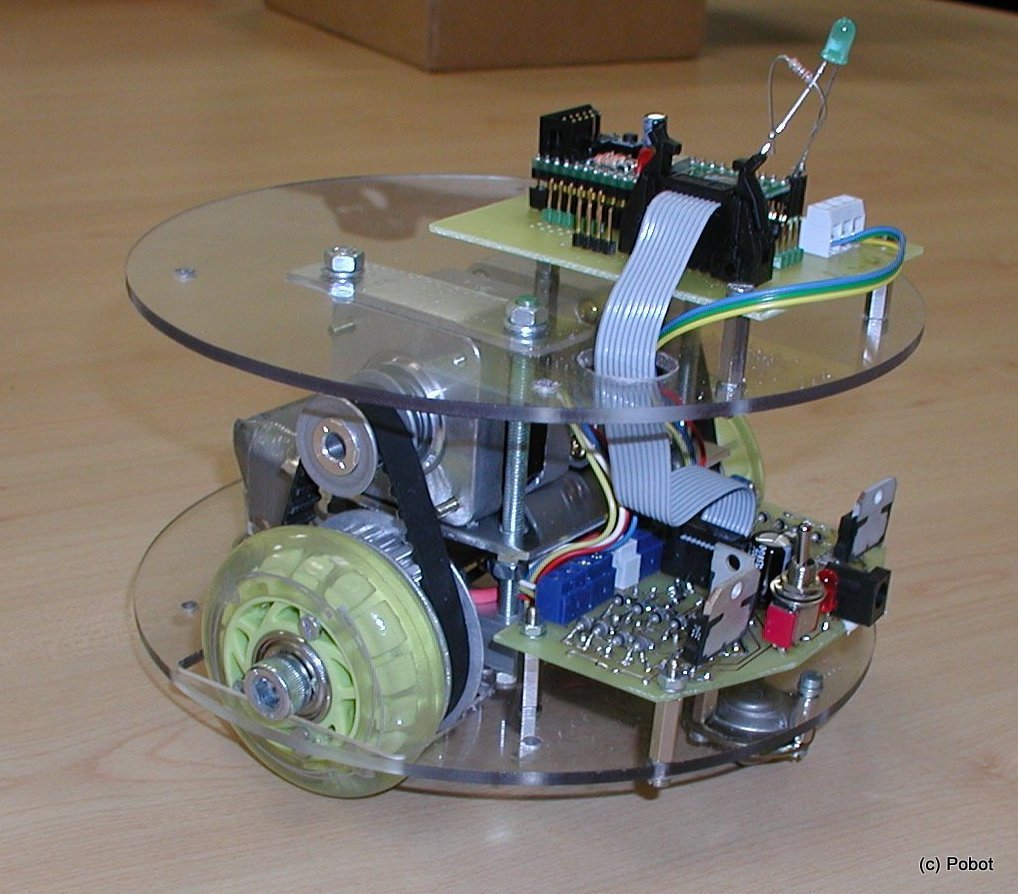
Enfin, la réparation est assez facile : la surface utile à chaque instant est beaucoup plus grande qu’avec les engrenages. Les dents de la courroie sont en contact avec plusieurs crans à la fois (voir les photos), alors que seulement deux dents des engrenages sont en contact.
La taille des poulies permet également des réparations plus faciles : un choc sur le flanc ou un trou dans un cran sera facilement réduit. Et je peux l’avouer maintenant qu’il y a prescription : il m’est arrivé de réparer une courroie avec une agrafeuse... mais elle n’avait pas cassé toute seule.
Mais avant d’arriver à casser les nouvelles courroies renforcées, vous avez le temps de faire plusieurs robots : celle présentée sur les photos est un modèle assez courant, qui remplace bien mieux les courroies noires qu’on pouvait utiliser il y a quelques années.
Les inconvénients
Il y a peu de choix : on trouve généralement quatre tailles de poulies crantées, ce qui limite les possibilités de réduction. Mais c’est surtout avec les courroies qu’on rencontre des problèmes : trop courte, trop longue, il est délicat d’essayer de faire sa propre courroie. On a bien essayé, mais lisez dans les paragraphes précédents comment ça a fini :)
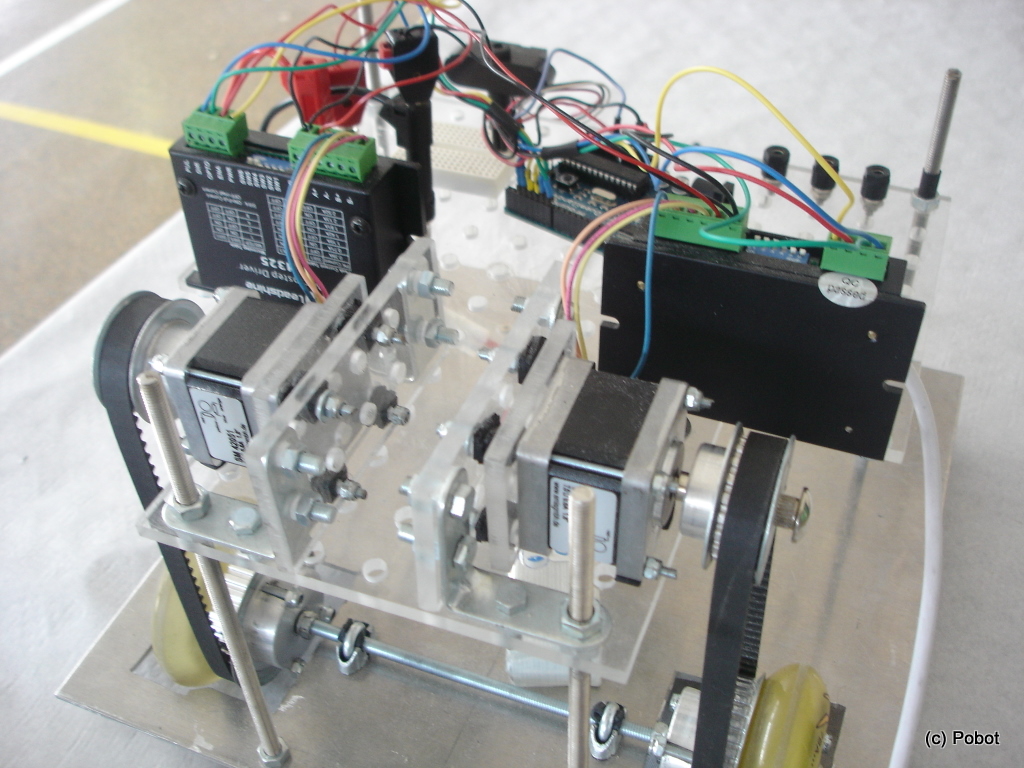
L’encombrement est aussi à prendre en compte : même si Henri a réussi à assembler des blocs démontables avec une courroie courte, ce niveau de mécanique n’est pas évident car il nécessite un ajustement aussi précis qu’avec les engrenages : pour la compétition, on ne peut pas se permettre d’avoir une courroie trop tendue ou trop lâche, et surtout il faut que la tension soit la même sur les deux moteurs gauche et droite afin que le robot avance droit car une courroie mal tendue peut faire forcer le moteur ou "prendre du retard" et dans tous les cas diminuer la vitesse de la roue.
Donc si vous simplifiez la construction avec l’astuce présentée précédemment (tiges filetées comme sur les photos ci-dessous), il vous faudra un peu plus de place.
Notre choix
Comme je l’ai dit plus haut, il n’y a pas un seul choix. Pour ma part j’ai toujours préféré les courroies parce que j’ai commencé avec... et la seule fois où j’ai utilisé des engrenages, c’était un robot secondaire pour la Coupe de France qui avait de fortes contraintes de place (et parce qu’il s’agissait d’un projet d’études pour un BTS de conception mécanique).
On peut aussi débuter avec des engrenages : Joël a récupéré des engrenages dans une imprimante et a construit son premier robot avec eux. Mais il a beaucoup de méthode et d’habileté.
A vous de jouer ! Si vous utilisez l’un ou l’autre, expliquez-nous les raisons de votre choix et si vous avez rencontré des problèmes inverses à ceux que nous avons présenté.





Vos commentaires
# Le 10 octobre 2016 à 15:02, par Xx_Dark_Kill3r_69_xX En réponse à : Engrenages ou courroie crantée ?
En réponse à : Engrenages ou courroie crantée ?
Franchement ton article il est vraiment trop cool il m’a grave aidé pour ma thèse sur les courroies à l’Université Paul Sabatié à Toulouse.
Je ne me souvenais plus ce qu’était un engrenage
# Le 16 octobre 2016 à 16:08, par Eric P. En réponse à : Engrenages ou courroie crantée ?
En réponse à : Engrenages ou courroie crantée ?
Merci pour le feedback et content que ça ait pu t’aider ;)
Répondre à ce message
# Le 10 décembre 2015 à 13:58, par lucas En réponse à : Engrenages ou courroie crantée ?
En réponse à : Engrenages ou courroie crantée ?
mercie vorte aide ma été super utile pour mon PPE (il est bien fait, bien organiser....)
😛
Répondre à ce message