 PoBot
PoBot
 Drikybot : contrôle des moteurs (2013)
Drikybot : contrôle des moteurs (2013)Pour mon projet le DrikyBot, j’ai dû réaliser un groupe propulseur avec un couple non négligeable.
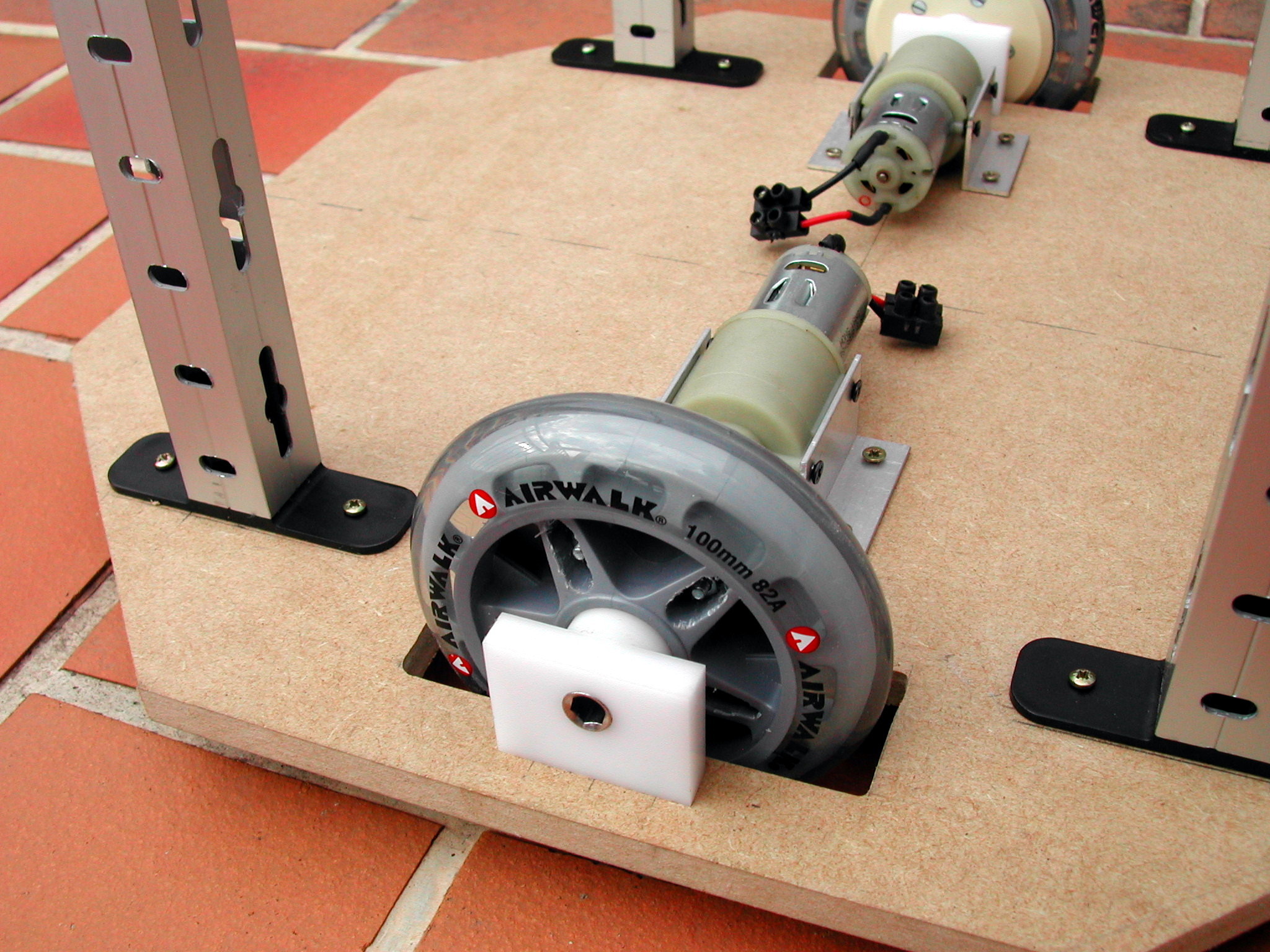
Une fois les moteurs montés sur ma base, il a fallu trouver un bon moyen de les contrôler, autrement dit la gestion de l’alimentation et le choix de la carte de contrôle.
Alimentation

Une des solutions est de réutiliser l’alimentation initiale de la visseuse(ci-dessus) en branchant les moteurs aux bornes qui vont bien (entourées en rouge dans mon cas photo ci-dessous) de même que pour la batterie (entourées en jaune photo ci-dessous) en s’arrangeant d’avoir les masses communes.
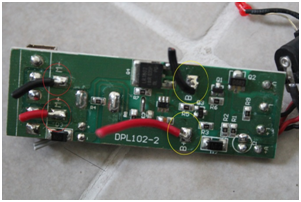
Avec cette solution la recharge de la batterie se fait directement par le chargeur vendu avec la visseuse.
D’autres batteries pouvant convenir sont par exemple des batteries de modélisme Lithium Polymere avec leur chargeur dans mon cas pour les 2 moteurs j’ai utilisé une batterie de 3300 mAh et 3,7 V :

Choix de contrôleur de moteur
Le contrôleur de moteur permet d’alimenter un moteur électrique en fonction des consignes.
Matériel nécessaire
• Arduino UNO
• Shield de contrôle moteur
• 2 Moteurs courant continu
• Batterie lipo
Ayant une carte Arduino à disposition un des produits pas cher pouvant convenir pour le projet est le shield 50A Dual-Channel Motor Drive.
Celui-ci permet le passage de 50A et une alimentation de 3.7 V, ce qui est parfait pour les moteurs de la visseuse.
Toutefois elle nécessite de gérer 8 signaux (dont 2 PWM par moteur et 2 pour l’enable).
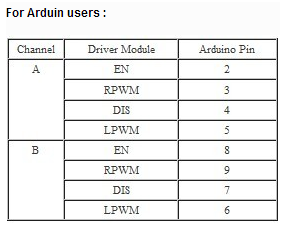
Une librairie de contrôle est fournie ici
Mise en garde : vérifier la configuration dans laquelle est la librairie (2 configurations moteurs) dans le fichier header MOTOR.H
La configuration étant au préalable sur le MOTOR_V2 ce sont les ports 10 et 11 qui sont utilisés et non les ports 5 et 6 comme indiqué sur le site du constructeur.
// #define MOTOR_V1
#define MOTOR_V2Pour revenir à la version 1 il suffit de modifier le code en démasquant la version souhaitée comme suit :
#define MOTOR_V1
// #define MOTOR_V2Une autre solution plus chère mais plus réputée aurait été le Sabertooth dual 25A motor driver beaucoup plus simple à mettre en œuvre. Elle offre plusieurs modes de contrôle et nécessite moins de signaux.
Conclusion
Concernant l’alimentation j’ai finalement opté pour la solution de la sécurité c’est-à-dire l’ajout d’une nouvelle batterie Lipo avec un chargeur qui va bien.
Pour ce qui est du contrôle, pour des raisons de coût j’ai choisi la carte 50A Dual-Channel Motor Drive.
Voilà mon Drikybot peut désormais étendre ses déplacements dans l’espace.





Vos commentaires
# Le 22 mai 2013 à 23:25, par Audrick F. En réponse à : Drikybot : contrôle des moteurs (2013)
En réponse à : Drikybot : contrôle des moteurs (2013)
Ok,j’ai modifié.
Répondre à ce message
# Le 22 mai 2013 à 22:07, par Eric P. En réponse à : Drikybot : contrôle des moteurs (2013)
En réponse à : Drikybot : contrôle des moteurs (2013)
Je ne comprends pas trop le problème "risque d’envoyer les 12V de la recharge dans les moteurs".
Pour commencer le chargeur étant fourni pour ces batteries, il ne fait pas 12V. De plus la charge est gérée par un CI sur le petit circuit, et les moteurs ne risquent rien de toute manière. La seule qui risque d’arriver est que le chargeur soit un peu à la peine si on essaye de mettre les moteurs en route pendant la charge, et encore.
Répondre à ce message