 PoBot
PoBot
 Détection de couleur de la balle
Détection de couleur de la balleLa reconnaissance de couleur de la balle capturée est réalisée via un IS471F travaillant en réflexion, les balles noires réfléchissant très peu les IR.
Ce détecteur est placée au fond de la benne.
Une mini platine regroupe l’IS471, la LED IR et un potentiomètre de limitation de l’intensité de la LED, afin de pouvoir régler la portée de détection, et une capa de découplage qui permet aussi de compenser les appels de courants de la LED lorsqu’elle éclaire. C’est relativement tassé afin de prendre le moins de place possible.
Vue de face
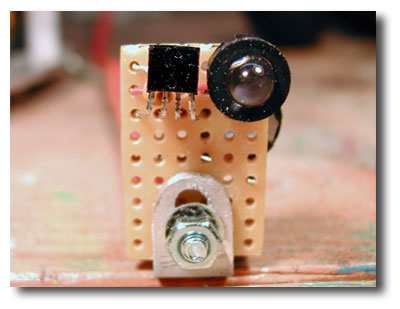
(je n’avais pas remarqué qu’il y avait autant de poussières sur les composants au moment de la photo)
Vue de 3/4
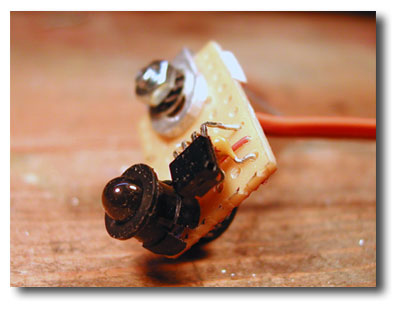
(vous noterez qu’il y a 3 couches de composants !!)
L’ensemble installé au fond de la benne
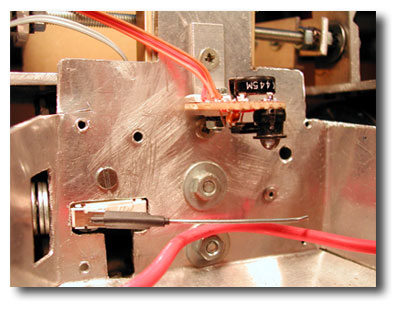
(on remarque le potentiomètre de réglage sur le dessus du circuit)
Et le tout en situation avec une balle
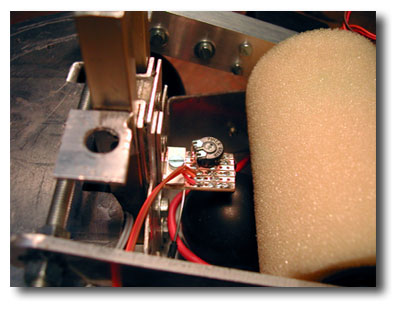
Et bien entendu, c’est testé et ça fonctionne. 🙂




