 PoBot
PoBot
 Construction des éléments
Construction des élémentsLe châssis

Le matériau de base est du plexiglas de 3mm, facile à se procurer dans les grandes surfaces de bricolage. Un des intérêts de ce matériau est sa transparence. Il ne faut pas travailler trop vite dans le plexiglas sous peine de le voir fondre. Cette recommandation est valable tant pour les découpes que pour les perçages.
La première étape consiste à reproduire le plan du châssis et de ses perçages sur le plexiglas et d’en faire la découpe. Pour les tracés, il suffit de poser sa plaque de plexiglas sur le plan et de le reproduire à l’aide d’une pointe à tracer. La découpe peut se faire soit à la scie sauteuse, soit à la scie à main en procédant par « approximation successives » puis en réalisant la finition à la lime ou au papier de verre.
Il faut effectuer les mêmes opérations pour la réalisation de la pièce rectangulaire de fixation des moteurs.
Les roues
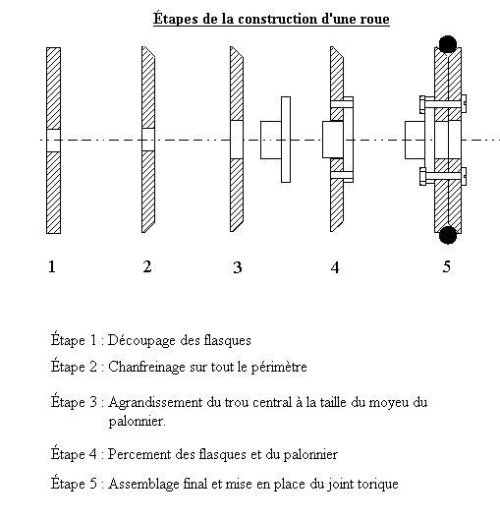
La réalisation des roues passe par la découpe de quatre disques de 45mm de diamètre. Pour cela il faudra se munir d’une scie cloche à fixer sur une perceuse. Ces scies, que l’on trouve pour quelques euros en grande surface de bricolage, sont constituées d’un support et d’une série de lames métalliques circulaires et concentriques. Il faut toutes les démonter et ne remonter que celle qui avoisine les 45 mm. La découpe se fait sans encombre à condition de tourner lentement. Ne vous inquiétez pas d’un résultat d’allure passable. Un peu de papier de verre et en quelques minutes vous aurez quatre disques parfait.
Chacun des disques devra voir son bord biseauté (voir figure 2) sur tout le périmètre. De cette façon en plaçant les disques face à face, bord biseauté à l’intérieur, vous obtenez un disque plus large, pourvu d’une gorge. Cette dernière supportera un joint torique de 45mm qui fera office de bande de roulement.
La finalisation des roues passe par un élargissement du trou central laissé dans les disques par le forêt de la scie cloche. Ce trou doit passer au diamètre extérieur du moyeu du palonnier de servo que vous allez utiliser (voir figure 2 étape 3). Il faut ensuite enfoncez le palonnier dans un des disques (voir figure 2 étape 4 ) et effectuer 2 perçages de 3mm. Le fait d’avoir agrandi le trou central du disque et d’y placer le palonnier assure un parfait centrage de celui-ci. L’opération se répète avec le second disque pour lui assurer le même perçage que le premier. Le palonnier est alors sorti, les deux disques mis face à face, biseau à l’intérieur, le palonnier s’applique contre les disques et le tout est maintenu par deux boulons M3.
Le joint torique peut alors prendre place, la première roue est terminée. Construire la seconde de la même façon.
Une roue en plexiglas et caoutchouc...

... devrait donner ce résultat
Les servos
Ils sont ici considérés comme de simples moto-réducteurs. Des modifications s’imposent donc. Choisissez des servos dit « standards », ouvrez les et retirez toute l’électronique interne ainsi que le potentiomètre de recopie de position.
Dans la partie supérieure, là ou se trouvent les pignons, retirez le pignon de sortie (le plus gros à l’opposé du moteur). Ce pignon porte une butée vouée à limiter sa rotation ; celle-ci doit être coupée délicatement à l’aide d’une petite pince coupante (voir les articles déjà parus dans ces colonnes et traitant de la modification des servos). Remontez ce pignon dans la coque supérieure du servo pour vérifier qu’il tourne librement sans accrocher.

Le servo étant ouvert, nous allons continuer à travailler dessus. En premier, réalisez un perçage du « pont interne » du servo qui soutient les pignons. Ce perçage de 4mm par 7mm environ est à faire depuis l’intérieur en passant entre le moteur et le logement du potentiomètre.

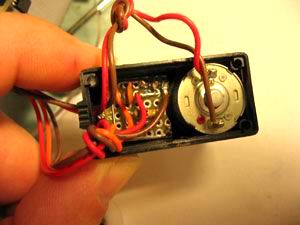
Pour finir il reste à dégraisser la partie inférieure du premier pignon en prise avec le moteur (celui qui tourne justement au dessus du trou que nous venons de réaliser) et de peindre, à moitié, celui-ci avec de la peinture à maquette noir mat (voir photo).
Une fois la peinture sèche la partie supérieure du servo peut-être remontée. En faisant tourner le servo à la main, vous devez voir, depuis le dessous, une successions de blanc et de noir par le trou que nous avons fait. Ceci va être exploité par notre capteur odométrique IR pour générer des signaux carrés correspondant aux tours du pignon.
Capteurs odométriques
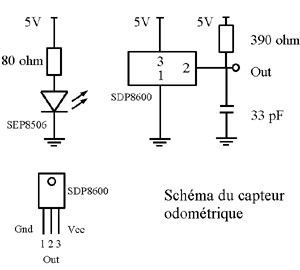
Ces capteurs sont faits à partir d’un module SDP8600 et d’une diode IR associée la SEP8506.
Le SDP8600 est en fait un module IR complet comprenant une photo-diode, un amplificateur, un régulateur de tension et un trigger de Schmitt. À condition d’alimenter ce module en 5v on obtient des signaux compatibles TTL. La mise en oeuvre du SDP8600 est très simple (voir schéma). Une résistance de pull-up de 390 ohms, une capa de 33pF et une résistance d’environ 100 ohms pour limiter le courant dans la diode IR.
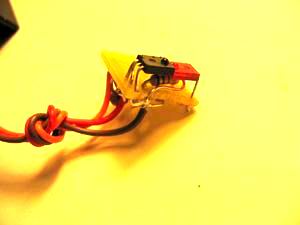
Cet ensemble doit prendre place à l’intérieur du servo de façon à ce que le SPD8600 et la diode SEP8506 soient face au trou pratiqué dans le pont intérieur du servo.
Compte tenu de la diversité des servos disponibles il n’est pas possible de fournir un typon pour cette réalisation, il faudra adapter un montage sur mesure en fonction de la place disponible dans vos servos. Vous pouvez tout de même vous inspirer de l’exemple réaliser dans des servos Hitec 325HB à partir d’un bout d’epoxy de prototypage de 16x16mm.
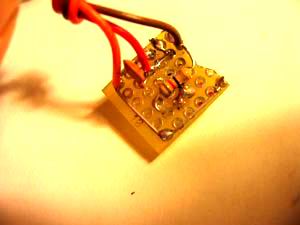
L’électronique optique : pas besoin de typon

Finalisation des moteurs et test des capteurs
Il ne reste plus qu’a souder deux fils sur le bornes des moteurs (pensez à faire des branchements inverses sur les deux moteurs de manière à ce qu’ils tournent en sens inverse) et à sortir les 3 fils des capteurs (5v, Gnd et signal).
Une fois les servos totalement remontés, alimenter le capteur et vérifier à l’oscilloscope que vous obtenez bien des signaux carrés sur la sortie en faisant tourner le palonnier du servo à main.
Si ce n’est pas le cas, l’alignement optique du SPD8600 et du SEP8506 avec le trou n’est pas bon. Démontez et vérifiez. En deux ou trois essais maximum, vous devez arriver à un résultat correct.





Vos commentaires
# Le 7 janvier 2010 à 19:41, par Guillaume En réponse à : capteur de position
En réponse à : capteur de position
Bonjour,
Je souhaiterai savoir de combien d’impulsion par tour de roue on dispose en modifiant un servo comme tu le proposes ? J’aimerai savoir également si l’on obtiens plus d’impulsion en placant un capteur réflectif sur les roues (vu sur pobot.org).
Enfin, quelle précision offrent ces deux solutions concernant les déplacements du robot ?
Merci d’avance
Guillaume
Répondre à ce message
# Le 22 janvier 2006 à 12:54, par Julien H. En réponse à : Odométrie
En réponse à : Odométrie
"Est-ce que je suis obligé d’asservir les servos par odométrie où je peux simplement utiliser le diamètre des roues etc... l’odométrie ca me parait compliqué pour débuter."
# Le 22 janvier 2006 à 12:55, par Julien H. En réponse à : Odométrie
En réponse à : Odométrie
Tu fais ce que tu veux. le plus dur, c’est pas d’exploiter l’information du capteur, c’est de modifier le servo, tu ne trouves pas ? une odométrie sur la roue plutôt que sur le moteur peut être utilisée, mais ça prend plus de place.
Sans odométrie, n’oublie pas que le servomoteur ne peut plus être piloté en position (comme on le fait en modifiant le créneau) car lorsqu’on permet au servo de faire un tour complet, on fixe la résistance d’asservissement et on ne contrôle qu’en vitesse (le servo ne sait jamais quand il est arrivé à sa consigne et continue à tourner sans cesse). Donc il faudra piloter le robot en temps de rotation : mesurer combien le robot parcourt en ligne de droite dans un temps fixé, tester combien de temps il faut faire tourner les moteurs pour décrire un demi-tour, etc..
Répondre à ce message