 PoBot
PoBot
 Construction de Nono
Construction de NonoBasé sur un robot de Giocchi Preziosi existant (Emiglio Laser), Nono a subi un peu de magie "JP" avec des morceaux de fraise dedans pour lui ajouter des moteurs pour son cou, et des leds pour animer son visage.



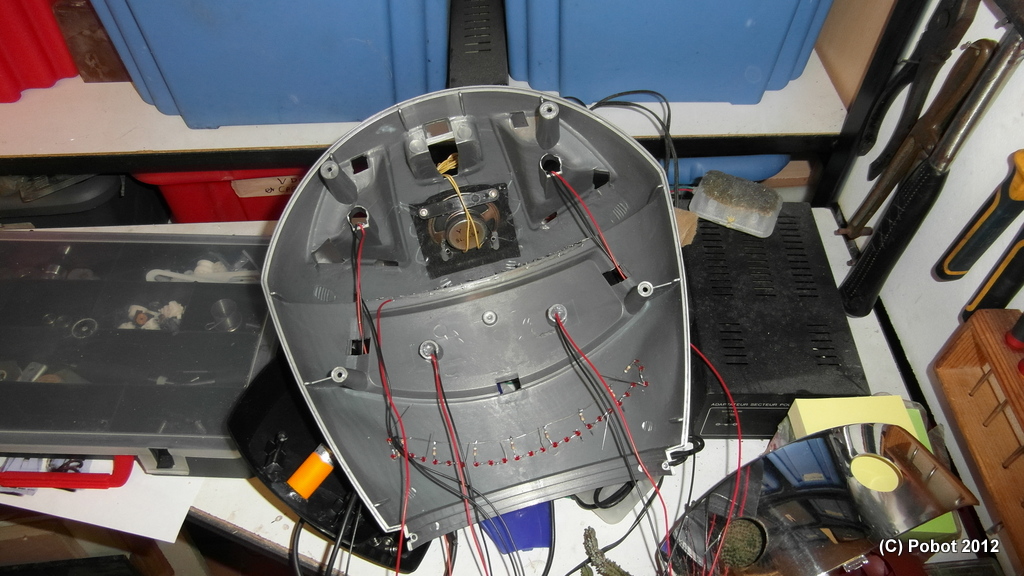
Ses bras ont été modifiés pour permettre d’afficher des symboles et de recueillir la réponse de son interlocuteur.
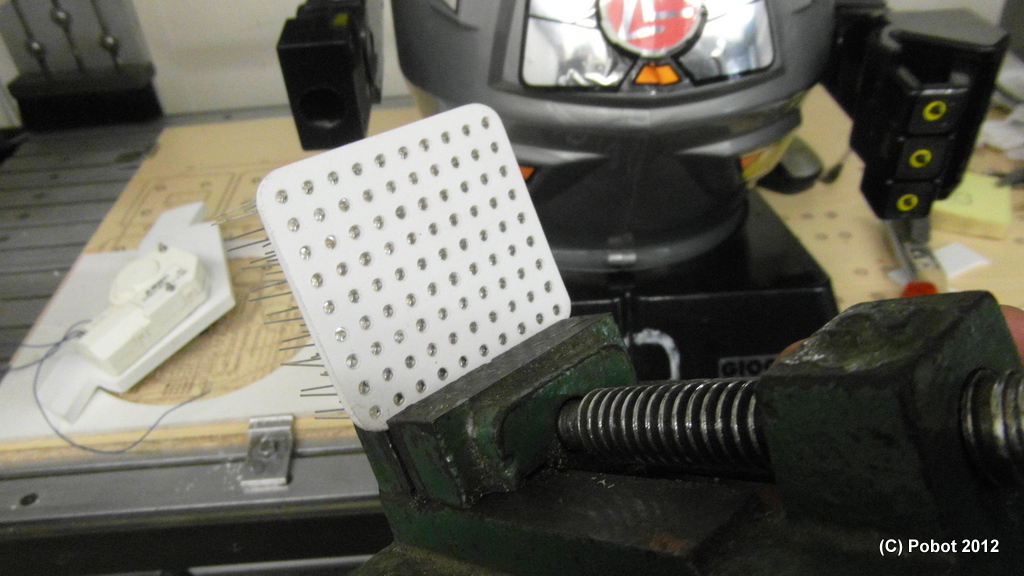

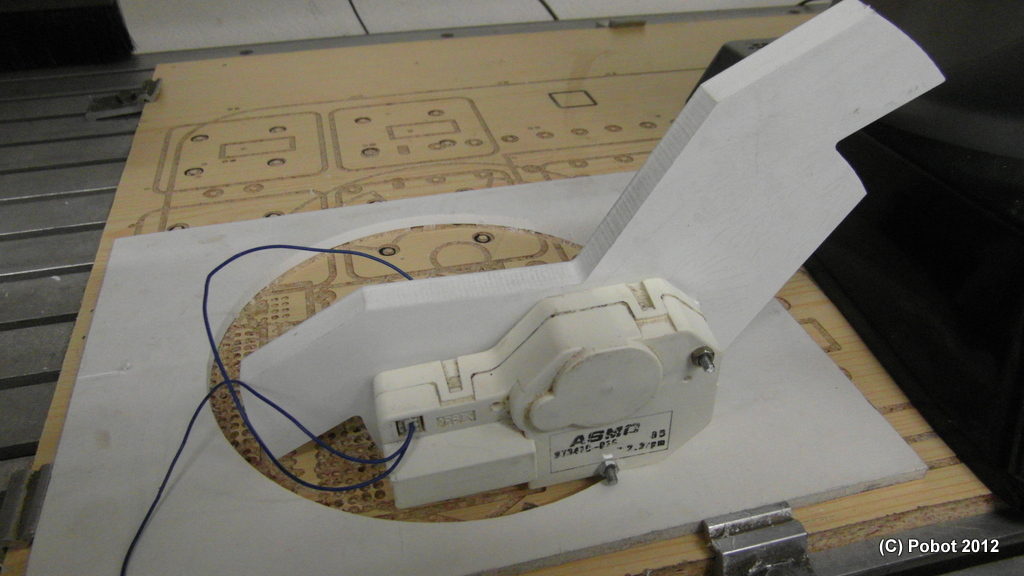
Bien entendu, la part belle est faite aux matériaux de récupération, comme les plaques de PVC expansé et les moteurs démontés :
Alimentation
Nono est alimenté par une tension continue de 12 volts apportée par une alimentation de PC modifiée pour ne conserver que les 12 volts (on enlève le 5 volts, le 3.3 volts et les tensions négatives).
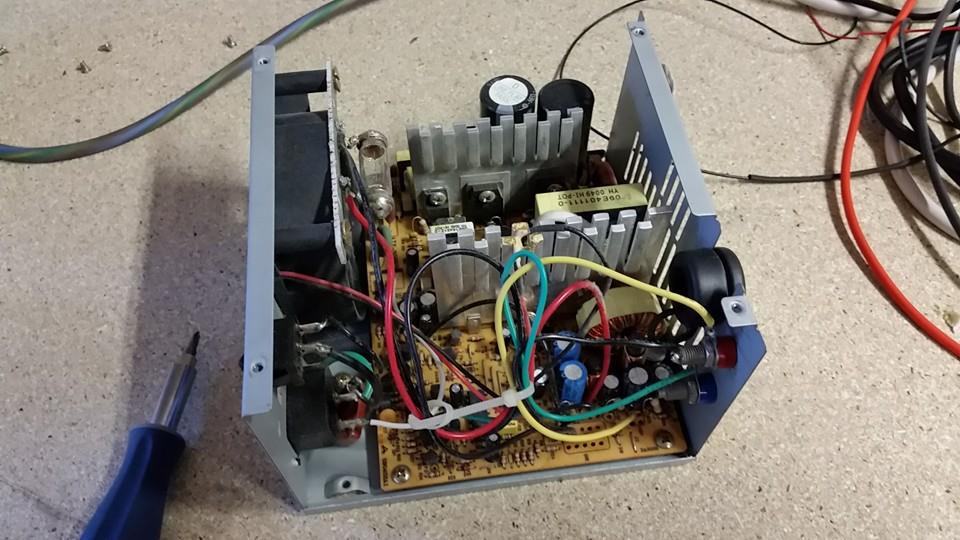
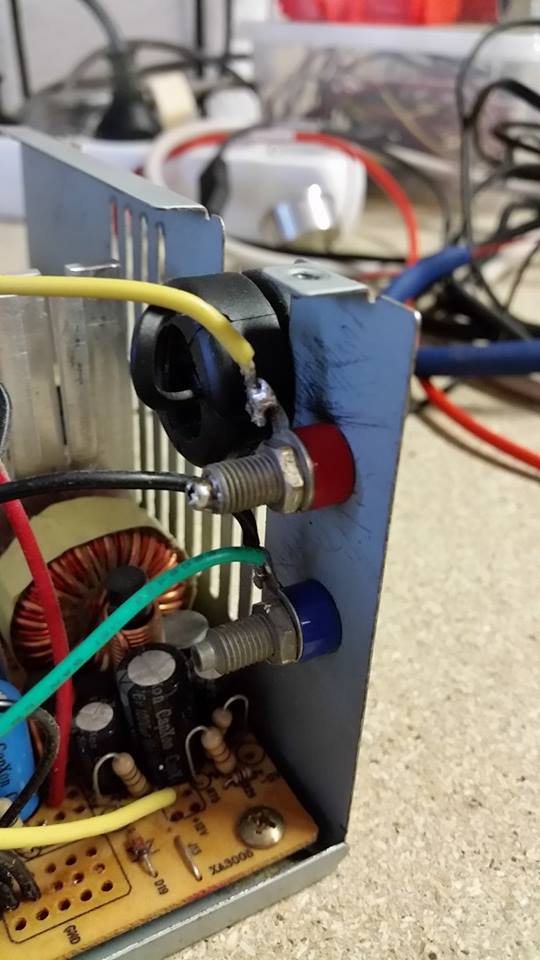
Voici l’intérieur de cette alimentation, avec deux changements majeurs :
– des douilles pour fiches bananes fixées directement dans son châssis en aluminium
– une ampoule de voiture pour avoir toujours une consommation minimum, nécessaire au bon fonctionnement de ces alimentations un peu vieilles (on s’en passe sur les récentes)
Attention, ne démontez jamais une alimentation lorsque le cordon secteur est branché au 220V. Et ne faites aucune modification sans des connaissances poussées en électronique et en électricité ou sans spécialiste pour vous guider. Pobot ne sera pas tenu responsable des problèmes et dégâts que vous occasionnera la reproduction d’une telle modification.
Deux câbles sont utilisés à partir de cette alimentation : un premier cordon apporte le 12V jusqu’au connecteur du socle du robot Nono, afin d’alimenter la carte Arduino Roméo et le régulateur 12V / 5V de la carte Raspberry Pi. Et un second cordon apporte le 12V jusqu’à l’écran d’affichage externe (en attendant sa future intégration possible dans le corps du robot..).




