PoBot
PoBot
 Carte CPU
Carte CPUDescription
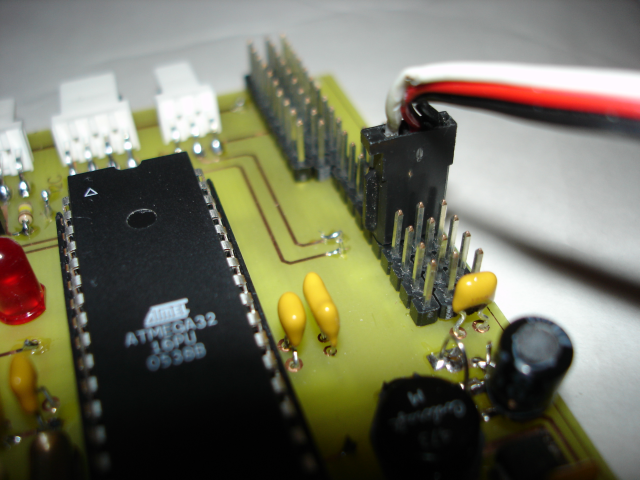
Basé sur la carte CNP-DIP, c’est une carte simple :
– Un Atmel ATMega324 (32Ko Flash, 2Ko RAM, 2Ko Eeprom),
– Un port de programmation (SPI),
– Deux port série (RS232 et TTL),
– Un port I2C
– Toutes les autres pins sont disponibles.
Mécanique : la taille de la carte est au format 1/2 Europe. Quant à la fixation, ce sera par boulons et écrous (avec entretoises au besoin).
Borniers Alimentation (x2) : comme sur la CNP-DIP, ce sont des Molex 2pts, capable de supporter 5A. Ils permettent de châiner plusieurs cartes.
Borniers RS232 (x2) : comme sur la CNP-DIP, ce sont des RJ9 (également chaînables).
Bornier Moteur-L298 : C’est un HE10, compatible avec les signaux utilisés pour la carte driver L298, déjà dévellopé par le Club. Les signaux sont :
– Signal Input1 pour Moteur1 & Moteur 2,
– Signal Input2 pour Moteur1 & Moteur 2,
– Signal Input3 pour Moteur1 & Moteur 2,
– Signal Input4 pour Moteur1 & Moteur 2,
– Signal Enable (driver on/off, commun aux deux moteurs).
Borniers Moteur-L6208 (x2) : Ce sont des Molex 5 pts KK-2.54mm avec détrompeurs (ils peuvent supporter 2.5A). Les signaux sont :
– Alimentation 5V de puissance (partie numérique driver),
– Signal Enable (driver on/off, commun aux deux moteurs),
– Signal CW/CCW (clockwise/counter-clockwise),
– Signal Clock (un créneau pour un pas),
– Masse.
Bornier I2C : La aussi c’est un Molex KK, mais 4 pts. Les signaux sont :
– Alimentation 5V de puissance,
– Signal Clock (ou SCL),
– Signal Data (ou SDA),
– Masse.
Celà permet d’avoir un "USB du pauvre" et de pouvoir convoyer les signaux et l’alimentation avec un seul câble vers les différents périphériques I2C.
Bornier Série TTL : La aussi c’est un Molex KK, mais 3 pts. Les signaux sont :
– Signal Data Out (ou TxD),
– Signal Data In (ou RxD),
– Masse.
Cette liaison série permet de communiquer avec la CMUCAM. Celle-ci sera alimentée directement par batterie.
Bornier E/S : comme sur la CNP-DIP, ce sont des barettes 2.54mm disposée en 3 rangées. La rangée du milieu convoie l’alimentation, pour éviter les pb de d’inversion.
Il y a en tout 20 E/S disponibles.
Entrées/Sorties
| Nb | Utilisation | Port CNP |
|---|---|---|
| 2 | Butée de Fin de Course | PC7 & PC6 |
| 1 | Signal de départ | PA7 |
| 1 | Commande Type Couleur des détecteurs optiques | PD7 |
| 2 | Détecteurs optiques Couleurs Terrain | PD6 & PD5 |
| 2 | Détecteurs optique Trou devant Roues | PD4 & PC5 |
| 1 | Détecteur Présence Balle dans Turbine | PA6 |
| 1 | Détecteur optique Couleur Balle dans Turbine | PA5 |
| 1 | Détecteur optique Présence Balle dans Devidoir | PA4 |
| 1 | Détecteur optique Trou devant Devidoir | PA3 |
| 1 | Commande du servo Clapet Dévidoir | PC4 |
| 1 | Commande du servo d’Orientation CMUcam | PC3 |
| 1 | Commande des servos Support Turbine | PC2 |
| 2 | série TTL (RXD,TXD) | PD3 & PD2 |
Jack de départ : préférer un système optique ou un REED au lieu du jack
Pas d’I/O analogique à priori.
Fichiers Eagle

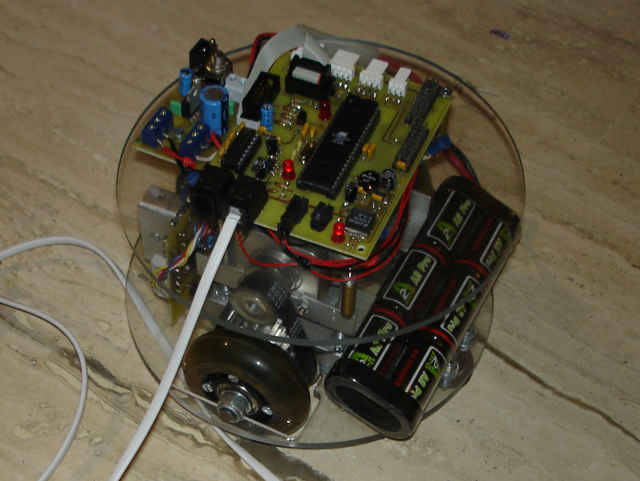
Tests
La carte a été montée sur un xPo en attendant le nouveau chassis du robot. Et ça fonctionne !