 PoBot
PoBot
 Balise lumineuse simple (2004)
Balise lumineuse simple (2004)Si vous devez aligner un robot où qu’il se trouve avec une cible, alors cette balise est faite pour vous : simple et efficace, comme nous avons pu le constater en 2004.
Le principe
On place deux balises émettant essentiellement des infra-rouges de chaque côté de la cible : à défaut de LED, on peut utiliser des ampoules à filament incandescent qu’on sous-volte, afin qu’elles soient à peine allumées. Dans cet état, le filament rougeoie à peine, mais émet déjà un niveau d’infra-rouge conséquent. Dans la pratique, nous avons utilisé deux ampoules de feu stop 12V en série, le tout alimenté avec un pack 7.2V :

On utilise ensuite un capteur sensible à l’infra-rouge sur le robot. A défaut d’un capteur spécialisé dans ce spectre, un capteur photo ou vidéo standard convient très bien, car (à moins d’avoir un matériel haut de gamme avec filtre intégré) ce genre de capteur voit au-delà du visible, et notamment dans l’infra-rouge. C’est d’ailleurs un moyen très connu de vérifier si une télécommande fonctionne : il suffit de la filmer avec une caméra ou un appareil photo de base, et les LEDs infra-rouge de la télécommande apparaissent alors comme des points lumineux sur l’image.
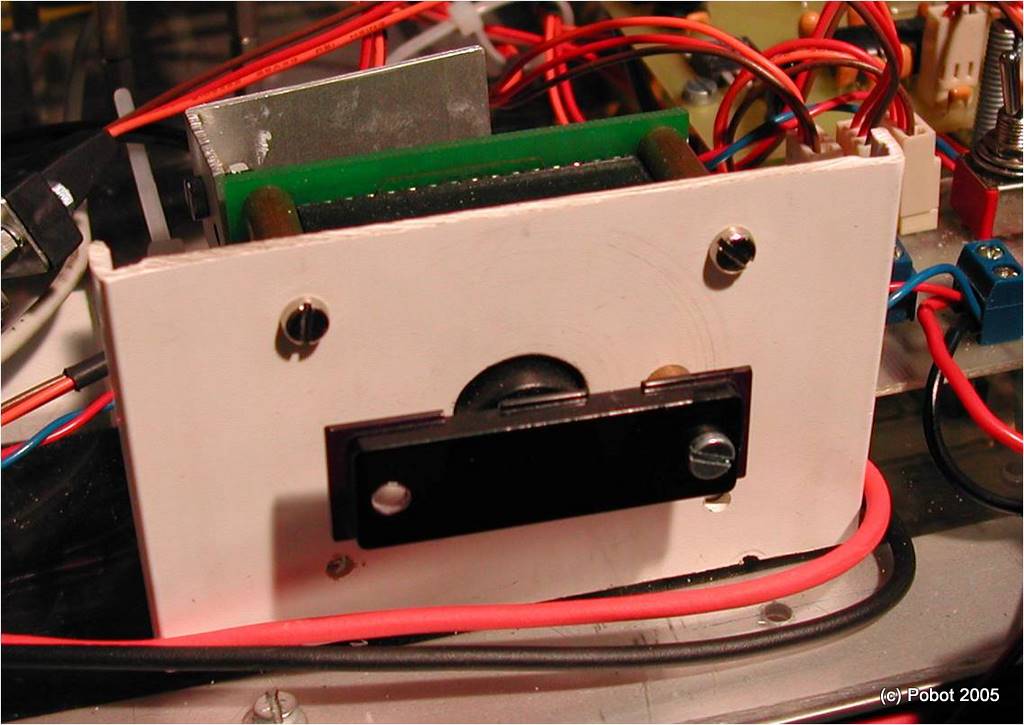
Nous avions utilisé dans notre cas une caméra CMU-cam, équipée comme vous pouvez le constater sur la photo d’un filtre récupéré sur l’avant d’une télé-commande, qui supprime la quasi-totalité du spectre visible.
L’image observée se réduit alors à deux points clairs sur fond noir, et le firmware embarqué de la CMU-cam en fournit directement le rectangle englobant. Lorsque celui-ci est centré dans l’image, ça veut dire que le robot pointe entre les deux poteaux. Nous faisions donc tourner celui-ci lentement à partir de la direction approximative des buts, jusqu’à ce que le couple de points soit correctement centré dans l’image.




