 PoBot
PoBot
 Balise de détection par rétro-réflexion (2011)
Balise de détection par rétro-réflexion (2011)Le laser permet une détection précise dans un encombrement réduit : l’avantage de son utilisation sur d’autres systèmes (radio, capteurs IR) est connu depuis nos débuts, comme le montre ce système à laser de 2004.
Mais pour pouvoir s’en servir dans les compétitions Eurobot, les équipes font face à une contrainte particulière depuis quelques années : seuls les lasers de classe 1 sont autorisés, ce qui limite les innovations technologiques basées sur la récupération de pointeurs lasers comme nous pouvions le faire (sans jamais aucun incident) auparavant.
Donc il a fallu s’adapter, et investir dans des appareils lasers industriels. Pour le système de détection de l’adversaire du robot 2011, Stephan a utilisé un modèle de SensoPart qui agit par rétro-réflexion sur un catadioptre.
Rétro-réflexion
Le principe de la rétro-réflexion permet d’avoir dans le même boitier un émetteur et un récepteur, ce qui est pratique pour un robot mobile, où les mécanismes de barrière ne sont pas envisageables.
D’un point de vue optique, il s’agit de renvoyer le plus de lumière vers sa source, quelle soit l’incidence de cette source et dans des conditions de faible luminosité. On trouve une utilisation courante de la rétro-réflexion dans la signalisation routière : trottoirs et panneaux sont équipés de matériaux réfléchissants.
Catadioptre
Des progrès réguliers sont faits pour améliorer la quantité de lumière renvoyée par la surface éclairée. Des sociétés de haute technologie comme 3M (le ruban adhésif "scotch", c’est eux, comme les Post-its) sortent des innovations particulièrement appréciables dans nos conditions d’utilisation.
Désormais, le catadioptre se trouve en film adhésif, de qualité industrielle, capable de se déformer autour de l’objet visé sans perdre ses qualités rétro-réfléchissantes. Pour détecter l’adversaire avec précision, la balise inerte posée en haut du mat était cylindrique et le scotch recouvrait toute la surface de 8 centimètres de haut.
Le rétroréflecteur "Diamond Grade" utilisé est sorti seulement en 2006. C’est un film ultra-fin appelé film microprismatique, il utilise une structure physique différente des réflecteurs classiques à micro-billes.
Capteur SensoPart FR10
La référence complète est FR10-RL-NSK4. Il coûte plus d’une centaine d’euros mais ses caractéristiques sont impressionnantes, à commencer par ses faibles dimensions : 3 centimètres de haut sur 1 centimètre d’épaisseur.
La lumière émise est polarisée, il s’agit d’un laser visible rouge de puissance réduite (classe 1). La distance de détection atteint les deux mètres, ce qui est tout à fait conforme aux besoins des compétitions Eurobot, où le terrain fait 3 mètres sur 2 mètres 10.

Réalisation et utilisation
L’expérience l’a démontré plusieurs fois : les robots sont très sensibles à la lumière. Une fréquence saturée, une puissance lumineuse trop grande, une variation rapide des ombres projetées, sont autant de pièges qui peuvent mettre en défaut toute conception simple ou complexe.
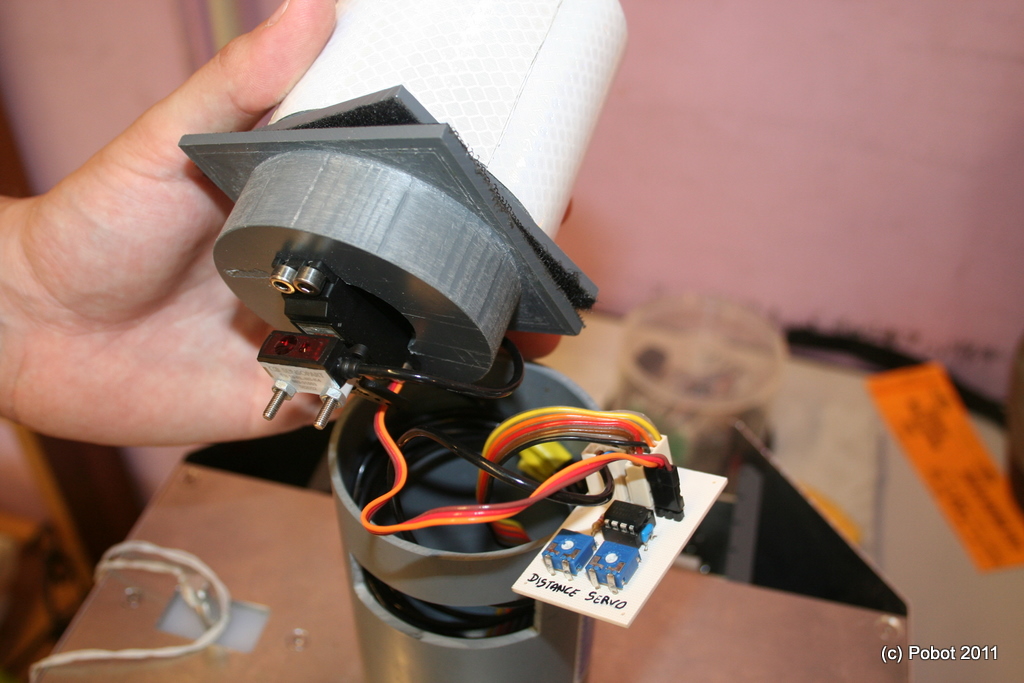
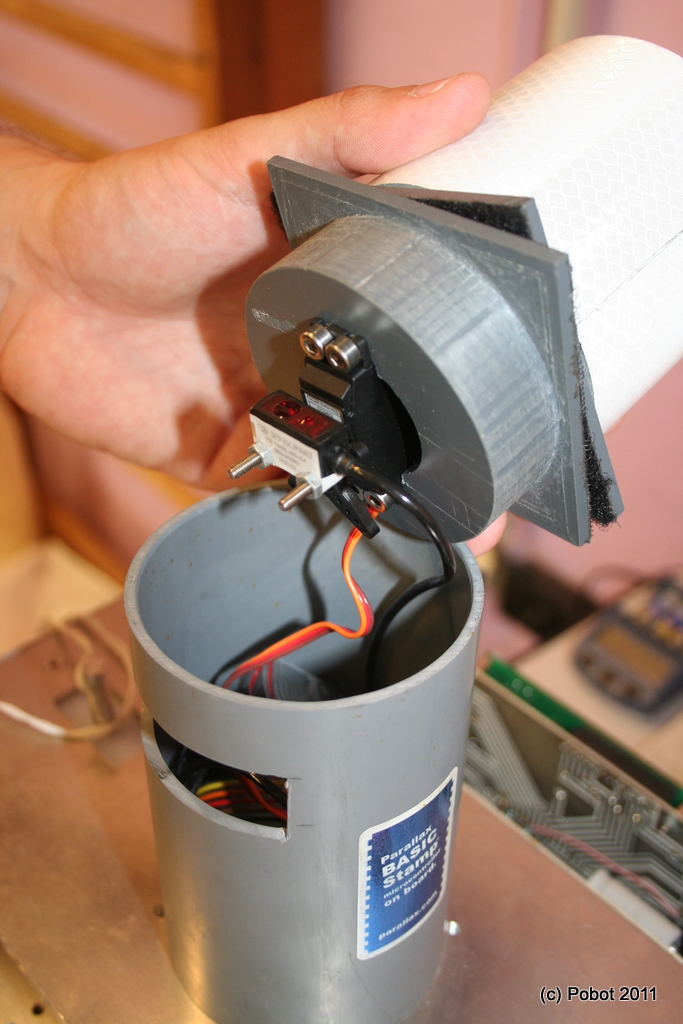
La balise 2011 a donc été préparée pour protéger le capteur de contacts directs. L’utilisation d’un laser permettait de faire une zone de sortie et d’entrée des rayons lumineux plus réduite qu’avec un autre capteur nécessitant un cône libre.
Bien que le robot puisse tourner sur lui-même, il était plus avisé de rendre mobile le capteur, et un simple servomoteur fit l’affaire. Ainsi lorsque notre robot gardait un cap fixe, le capteur pouvait détecter un adversaire approchant selon un secteur circulaire suffisamment étendu pour réagir et changer notre trajectoire.
Le capteur est simple à interfacer : 4 fils dont l’alimentation. Il s’utilise comme un photo-transistor NPN. Pour gérer le moteur et le capteur, une carte miniature a été réalisée, elle n’est guère plus grande que le capteur.

Le système a très bien fonctionné et on a pu entendre lors des matchs retransmis en direct par vidéo un commentaire admiratif du présentateur de la Coupe de France.





Vos commentaires
# Le 29 août 2012 à 16:30, par fraxen En réponse à : Balise de détection par rétro-réflexion (2011)
En réponse à : Balise de détection par rétro-réflexion (2011)
Bonjour
avant tout merci pour le partage, c’est très intéressant ce que vous faite sue votre site.
je suis étudiant en dernière en électronique et je travail sur un capteur laser famille sensopart pour détection de mouvement ( Émetteur FS 10 / récepteur FE 10)
je voudrais savoure si c’est possible comment vous faite pour l’acquisition des signaux de votre capteur afin de faire le traitement des données, j’ai pu avoir d’information sur ces capteurs.
merci d’avance
fraxen
# Le 29 août 2012 à 21:13, par Julien H. En réponse à : Balise de détection par rétro-réflexion (2011)
En réponse à : Balise de détection par rétro-réflexion (2011)
Bonjour,
A première vue, c’est une lecture tout ou rien (barrière optique).
Il faut l’utiliser comme un interrupteur.
# Le 16 janvier 2013 à 13:50, par Goo En réponse à : Balise de détection par rétro-réflexion (2011)
En réponse à : Balise de détection par rétro-réflexion (2011)
Bonjour,
Je ne comprends pas un détail, le capteur étant en lecture tout ou rien, cela vous donne uniquement la position angulaire de l’adversaire non ?
Comment obteniez vous la distance de l’adversaire ?
Merci d’avance
Répondre à ce message