 PoBot
PoBot
Accueil > Projets, études > Nos robots > Robots du club > Robots à pattes > Le Pobbypède (2010-2013)
 Le Pobbypède (2010-2013)
Le Pobbypède (2010-2013)
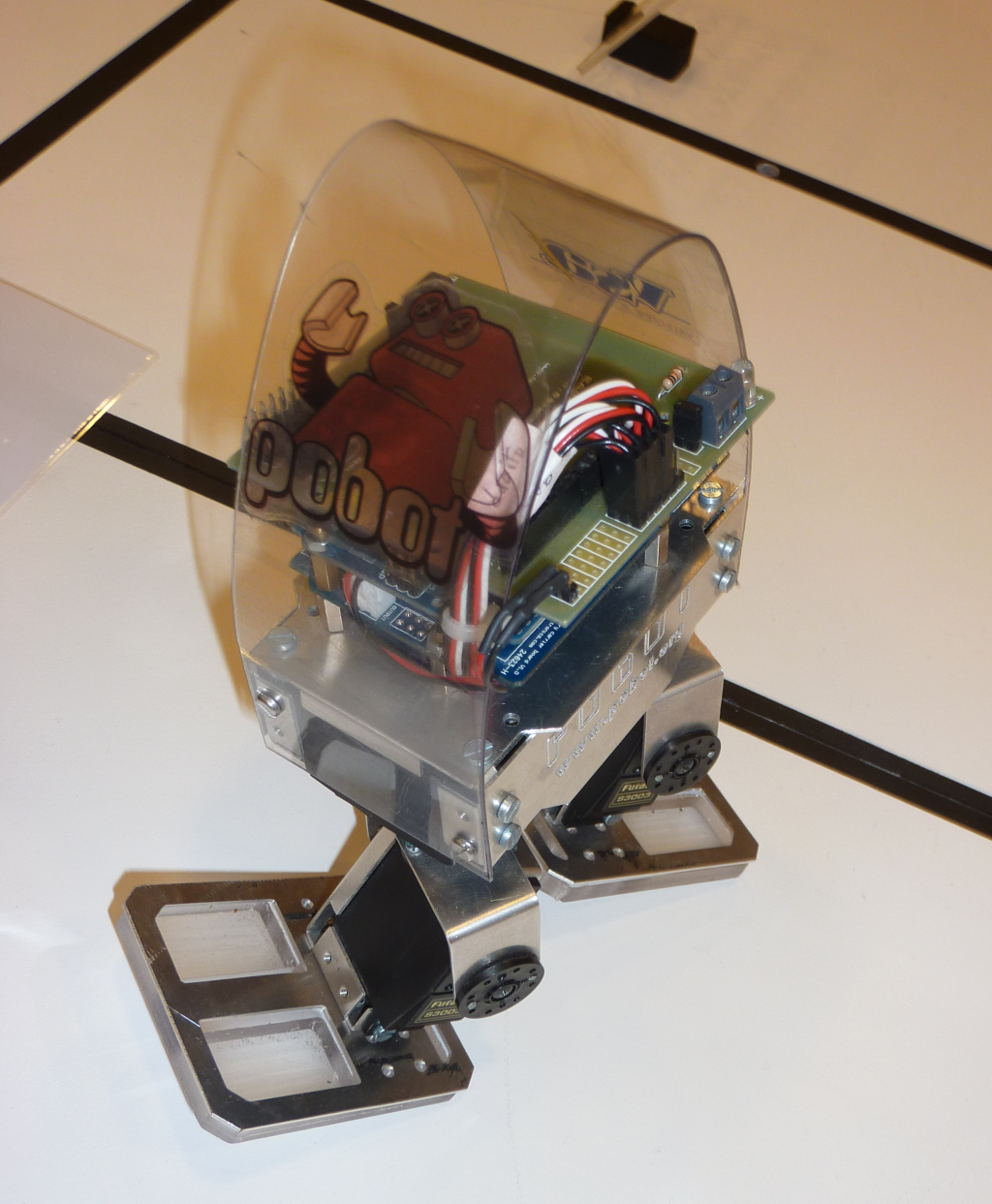
Le premier robot à pattes du club est un humanoïde bipède à 2 degrés de liberté par jambe, soit 2 axes de rotation : hanche (pivot vertical) et genou (avant/arrière des deux parties de la jambe).
Sa mécanique est simple, à base de briques EasyRobotics pour servomoteur et d’une électronique facile d’accès grâce à Arduino. Cependant sa simplicité rend son évolution moins fluide, lui donnant une démarche assez rigolote.
Il a évolué avec différentes électroniques permettant d’étudier les différents pilotages possibles. Il est toujours utilisé dans nos ateliers car même les débutants peuvent l’utiliser pour découvrir les principes de mécanique et de contrôle de servomoteurs.
Le robot est accessible à tous ceux qui veulent essayer ce mode de déplacement, lors des ateliers et des réunions du club.
Articles
-
 Electronique du robot bipède
Electronique du robot bipède
24 juillet 2010, par Julien H. -
 Logiciel de configuration du bipède
Logiciel de configuration du bipède
14 novembre 2009, par Julien H. -
 Logiciel d’un robot bipède
Logiciel d’un robot bipède
17 novembre 2013, par Julien H. -
 Les bottes de plomb
Les bottes de plomb
24 juillet 2010, par Julien H. -
 Robot bipède Easyrobotics
Robot bipède Easyrobotics
28 octobre 2009, par Julien H.




