 PoBot
PoBot
Accueil > Projets, études > Nos robots > Musée des robots > µPoBot (2003)
 µPoBot (2003)
µPoBot (2003)
Articles écrits par Patrick Pollet - le concepteur du µPobot et fondateur du club - pour le magazine Electronique Pratique n°280 de Décembre 2003 (Micros et Robots)
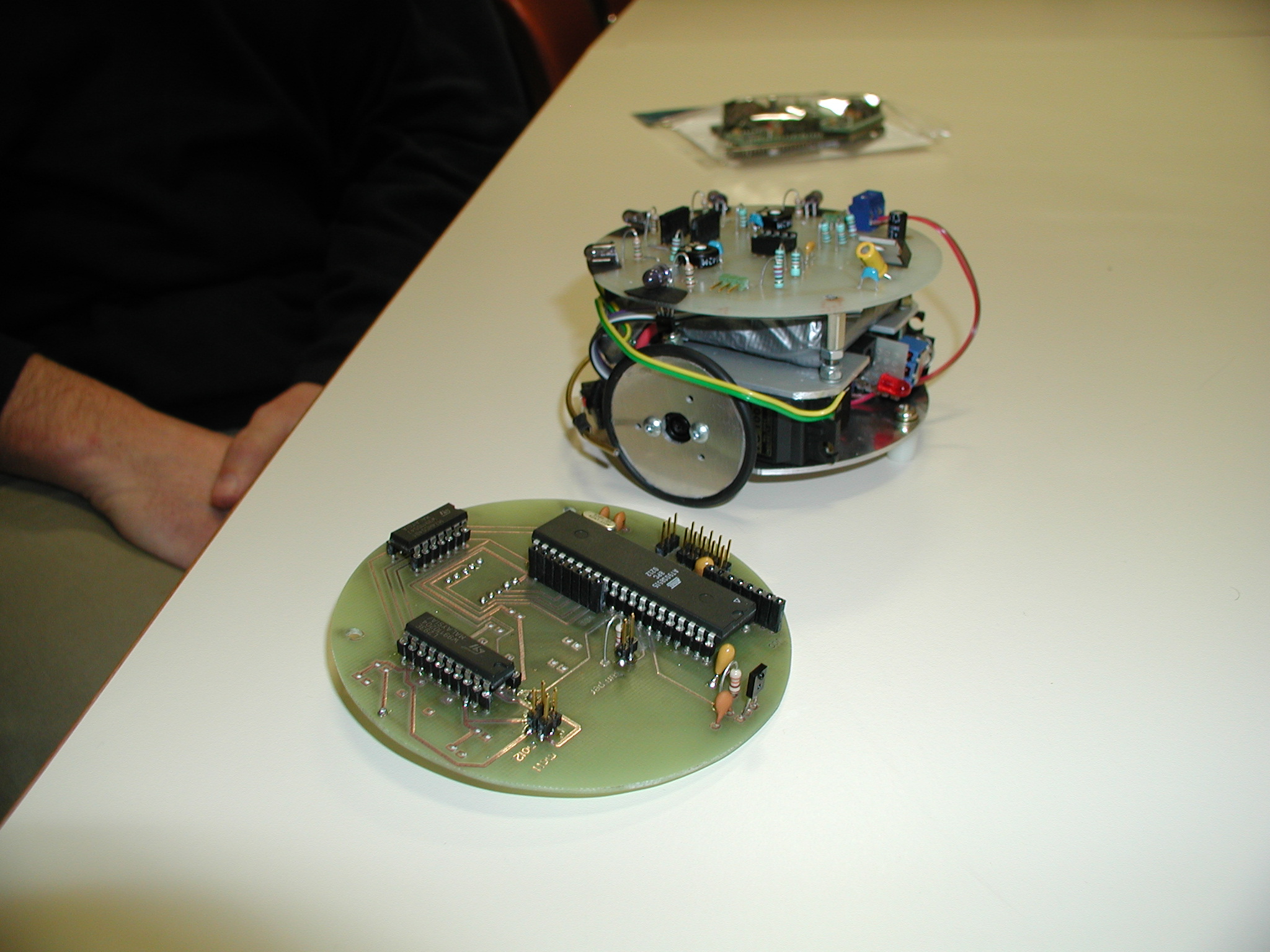
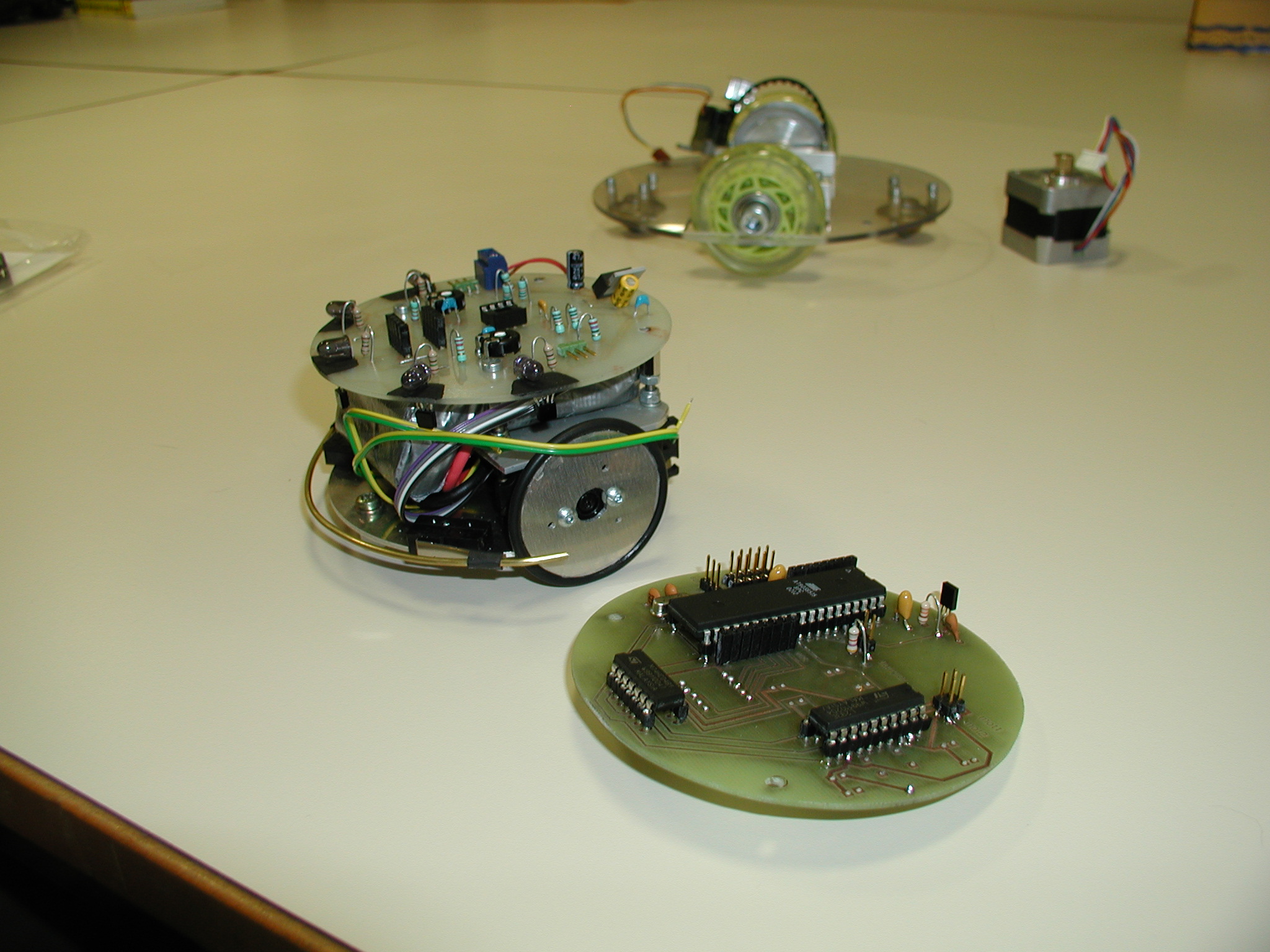

Le robot que nous présentons ici porte un intérêt particulier : hormis une construction simple à la portée de tous, il présente de grandes possibilités d’expérimentations et d’évolutions. On pourra remarquer que les servos sont dépouillés de leur électronique et sont traités en simples moto-réducteurs pilotés en PWM pour un meilleur contrôle.
Autre spécificité importante : un capteur IR est intégré au servo offrant ainsi une information odométrique. Ceci ouvre les portes à des algorithmes d’asservissements en vitesse ou en position. Nous reviendrons en fin d’article sur les extensions possibles, en particulier grâce à la caméra CMUCAM.
Retour en force en 2005 puisque le µPobot a été utilisé pour l’épreuve des Jeux de Sophia de cette année-là.

Articles
-
 Introduction
Introduction
18 octobre 2005, par Patrick -
Conception mécanique
18 octobre 2005, par Patrick -
Construction des éléments
18 octobre 2005, par Patrick -
Description de l’électronique
18 octobre 2005, par Patrick -
Réalisation et assemblage
19 octobre 2005, par Patrick -
Programmation & conclusion
17 août 2006, par Patrick




