 PoBot
PoBot
Accueil > Projets, études > Nos robots > Robots Eurobot > PoBot 2009 (aka Multivac)
 PoBot 2009 (aka Multivac)
PoBot 2009 (aka Multivac)
Présentation du robot participant à la Coupe de France de robotique 2009. Il est baptisé Multivac et a été réalisé par l’équipe constituée de Patrick (initiateur du club), de Daniel et de Franck.
C’est un robot qui se veut réutilisable car il s’appuie sur une base mobile et un bras manipulateur dont le mécanisme de préhension serait adaptable selon la thématique de la coupe.
Pour cette première année, on utilise une pompe à vide et une ventouse comme mécanisme de préhension.
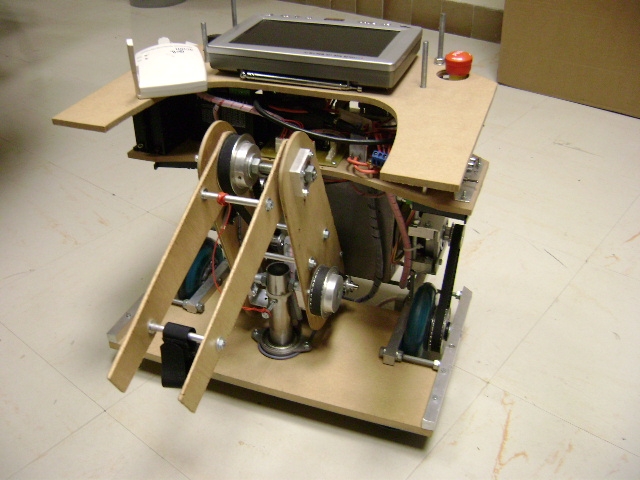
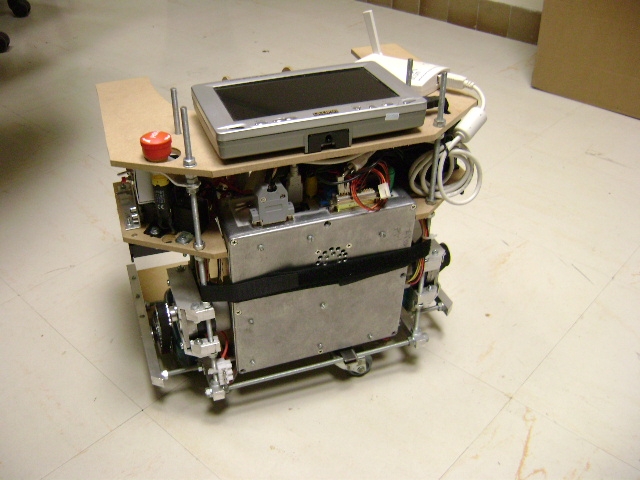
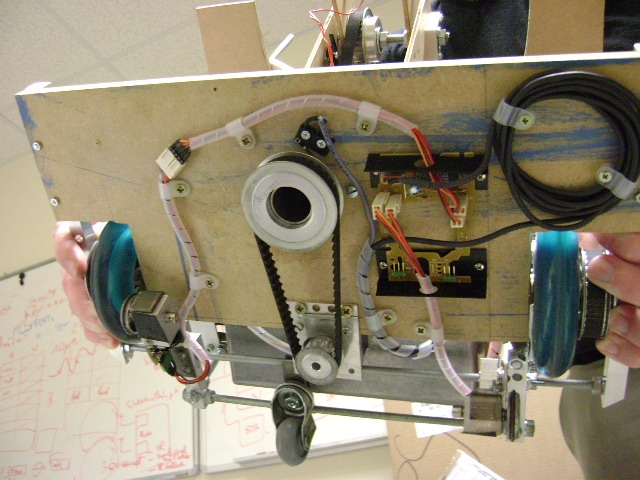
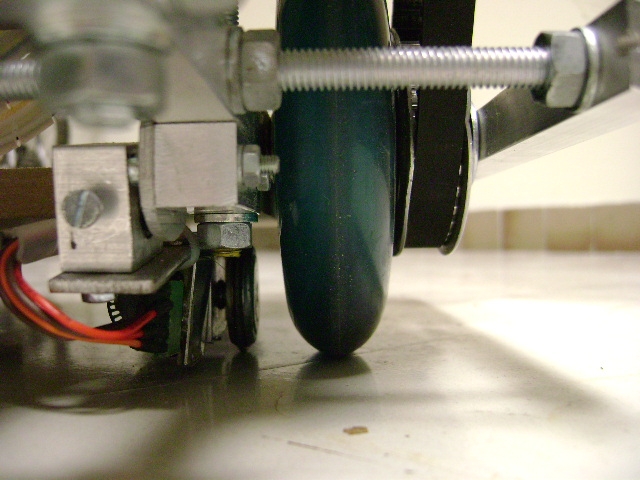
Le robot en photos :




A l’année prochaine pour un nouveau robot !!




