 PoBot
PoBot
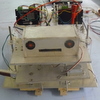
Un robot mobile autonome conçu et réalisé dans le cadre de mes études en robotique.
Le matériel utilisé est le suivant : moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17. roues de roller, poulies et courroies crantées drivers de moteurs M325 de Soprolec carte électronique programmable Arduino Duemilanove caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology mécanique en aluminium et plexiglas, architecturé par des tiges filetées batteries Lithium (…)
Accueil > Mots-clés > Composants > caméra
caméra
Plusieurs dispositifs existent pour doter un robot d’un système de vision, regroupés sous l’appellation de caméra.
On peut ainsi citer la webcam mais il existe des systèmes optiques qui contiennent des algorithmes de détection : CMUCAM, Pob-Eye par exemple. Certains dispositifs sont vus comme des caméras, alors qu’ils sont bien plus complexes, comme le capteur RGB-D du Microsoft Kinect
Nous utilisons plusieurs caméras selon les besoins : avec nos propres algorithmes de traitement d’images ou en réutilisant des bibliothèques de code.
Articles
-
 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)
19 janvier 2011, par Sébastien Corner -
 Localisation d’un robot par Wiimote
Localisation d’un robot par Wiimote
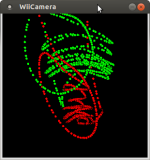
25 janvier 2011, par Julien H.Nous connaissons déjà la caméra infra-rouge équipant la Wiimote : elle permet de recevoir directement les coordonnées des 4 points les plus brillants.
On peut l’utiliser pour localiser un robot, avec deux variantes : la caméra (Wiimote complète ou démontée) est sur le robot la caméra est fixe et observe le robot depuis l’extérieur
Caméra embarquée sur le robot
La première solution nous semble la plus judicieuse, surtout si on fixe des lumières (spots peu diffus par exemple) sur un (…) -
 Light-painting avec une Wiimote
Light-painting avec une Wiimote
28 décembre 2012, par Julien H.A vrai dire, la peinture de lumière n’est pas le sujet traité par les étudiants à qui nous avons donné un coup de pouce, mais c’est la partie qui nous a intéressée. En effet, si les adhérents du club mettent à disposition leurs connaissances et quelques ressources pour des projets scolaires, nous ne traitons pas les aspects pédagogiques clés.
C’est le cas pour ce TIPE où il était nécessaire de mesurer un mouvement. Connaissant bien les difficultés de mise en œuvre des accéléromètres et des (…) -
 Caméra pilotée par AVR
Caméra pilotée par AVR
13 août 2010, par Julien H.Cette caméra utilise la même optique que la CMUcam ou la POB-Eye mais avec un microcontrôleur AVR Atmel (ATmega8) pour implémenter le traitement d’image et la communication série. Présentation de l’AVRcam sur JRobot
Le soft est open-source et on peut ajouter ses algorithmes par reprogrammation ISP. On pouvait l’acheter en 2004 mais il semble que le projet soit arrêté.
En tout cas cela montre que c’est possible :) -
 Caméra Kinect
Caméra Kinect
7 novembre 2010, par Julien H.Le domaine des jeux vidéo peut servir la robotique mobile. L’exemple de la Nintendo Wii montre combien les évolutions faites dans ce domaine apportent à la robotique : baisse du prix des composants, large communication auprès d’un public différent.
Les Wiimote, Nunchuck et autres Wii Motion Plus ne sont plus les seuls accessoires du gamer à titiller l’intérêt des bidouilleurs, puisque Microsoft a sorti récemment la caméra Kinect. La caméra est USB et est destinée à la console XBOX 360. (…) -
 Vision par CMUCAM (2003)
Vision par CMUCAM (2003)
26 septembre 2005Dès 2003, Eric a développé une interface homme-machine permettant l’acquisition d’une trame de la caméra CMUCAM, l’affichage sur un écran et ainsi capturer le choix de l’utilisateur pour la plage de couleur à analyser.
Cette petite application a été montrée à la Fête de la Science dans les locaux de l’INRIA à Sophia-Antipolis. -
 Installation de la Pob-Eye 2
Installation de la Pob-Eye 2
22 novembre 2009, par Julien H.La caméra Pob-Eye 2 est fournie avec un CD-ROM de logiciels (que je n’avais pas au moment des tests donc je ne listerai pas son contenu), mais on peut les télécharger sur le site de la société Pob Technology après s’être inscrit.
Le site n’était pas très pratique, il n’y a pas de confirmation d’enregistrement donc surveillez votre boite mail car vous recevrez un mail de confirmation d’inscription avec un lien sur lequel il faut cliquer.
[édition 2011] le site a changé, donc vous devez (…) -
 Caméras CMUcam
Caméras CMUcam
13 août 2010, par Julien H.On connait bien cette petite caméra qui embarque un code de détection de couleur et de traitement statistique, puisqu’elle équipe certains de nos robots : Le Maxi Palet (2003) Le Gobeur / Coupe de France (2006)
Version originale
Nous avons fait l’acquisition d’une CMUcam peu de temps après son apparition. Des démonstrations ont été faites en 2003 et 2004 et nous avons équipé le robot de la Coupe de France avec cette caméra pour la détection des ronds bleu / rouge sur le terrain 2006 (…) -
 Webcam 3D Minoru
Webcam 3D Minoru
26 septembre 2010, par Julien H.Apparue en 2009, il aura fallu attendre un an pour qu’elle devienne populaire comme une alternative bon marché pour la communauté robotique. Mais désormais la 3D est à notre portée, hourra !
Ses caractéristiques sont modestes : 640x480 à 30 images par secondes accès aux deux images gauche droite pour traitement ultérieur accès à une seule image anaglyphe pour utilisation directe connexion USB (mais c’est plutôt un avantage)
Pour l’acquérir, compter 30 euros d’occasion (c’est le prix (…) -
 Carneggie Melon University
Carneggie Melon University
12 juillet 2011, par Julien H.L’université américaine Carnegie Mellon héberge un Robotics Institute particulièrement célèbre en robotique amateur, grâce à sa CMUCAM, une des premières caméras pour robots mobiles permettant avec un minimum de ressources et pour un prix modéré (plus d’une centaine d’euros tout de même) d’obtenir une détection de couleur efficace.
C’est près d’une dizaine de centres de recherche dédiés chacun à un aspect différent de la robotique qui ont permis au laboratoire de robotique de CMU de (…)
