 PoBot
PoBot
Cet article retrace les échanges que nous avons eu régulièrement en interne. En effet, même quand on connait bien les moteurs électriques, le choix n’est pas toujours évident et fait intervenir de nombreux critères.
En espérant que cette présentation vous soit utile, n’hésitez pas à nous faire part de votre propre expérience.
Quand vient l’heure du choix
Avant de déterminer le bon moteur pas-à-pas, il a fallu prendre la décision d’utiliser cette technologie. Il y a divers inconvénients (…)
Accueil > Mots-clés > Sponsors > Soprolec
Soprolec
Cette société française commercialise différents types de moteurs et les contrôleurs pour les commander. En particulier des moteurs pas-à-pas et des drivers tout intégré qui facilitent la réalisation d’un robot sans coûter plus cher et avec tellement plus de puissance et de précision que ce qu’on peut faire soi-même.
Ils nous ont fourni divers moteurs et drivers, et en particulier deux contrôleurs de BLDC (moteurs brushless) qui nous permettront de progresser dans nos connaissances des moteurs modernes.
Articles
-
 Choix d’un moteur pas-à-pas
Choix d’un moteur pas-à-pas
27 août 2010, par Julien H., Stephan -
 Banc de simulation dynamique
Banc de simulation dynamique
27 avril 2009, par Julien H.Ce nouveau projet consiste à tester le fonctionnement de différents moteurs dans des conditions proches de l’utilisation en robotique mobile sans avoir à subir les contraintes de mise en oeuvre réelle sur une base roulante.
Ainsi, ce banc de simulation servira à la fois aux débutants pour tester leurs algorithmes de contrôle, et aux plus expérimentés pour rechercher les paramétrages aux conditions limites de fonctionnement avant patinage. Lorsque nos tests seront terminés, nous pourrons (…) -
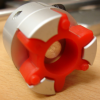 Accouplement moteur
Accouplement moteur
1er mars 2011, par Julien H.Une pièce spéciale est souvent nécessaire en robotique pour fixer une roue sur un moteur. Plus généralement, un accouplement moteur s’avère indispensable dans les conditions suivantes : quand l’axe moteur n’a pas la bonne taille (diamètre ou longueur) quand le moteur est d’accès difficile ou sensible
Différentes solutions
On peut réaliser un accouplement en faisant une pièce sur mesure.
On découpe un barreau d’aluminium et on perce chaque extrémité au bon diamètre, et on peut également (…) -
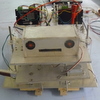 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)
19 janvier 2011, par Sébastien CornerUn robot mobile autonome conçu et réalisé dans le cadre de mes études en robotique.
Le matériel utilisé est le suivant : moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17. roues de roller, poulies et courroies crantées drivers de moteurs M325 de Soprolec carte électronique programmable Arduino Duemilanove caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology mécanique en aluminium et plexiglas, architecturé par des tiges filetées batteries Lithium (…) -
 Nos fournisseurs
Nos fournisseurs
9 juillet 2007, par Julien H.références rapides vers des sites vendant du matériel pour la robotique
-
 Machine à commande numérique : éléments
Machine à commande numérique : éléments
14 mars 2011, par Julien H.Une machine-outil à commande numérique (appelée CN ou encore CNC) permet l’usinage de matière (bois, métaux, plastiques) pour réaliser des pièces.
Nous présentons ici les éléments constituant une fraiseuse à commande numérique construite "maison" à partir de pièces récupérées ou achetées, en particulier à Soprolec, spécialiste français des pièces mécaniques pour CNC. Mécanique
Vue d’ensemble
Châssis
Astuce
Moteurs Composants électroniquesExemples d’utilisation
