 PoBot
PoBot
Nous utilisons Processing pour réaliser de petits logiciels de communication avec nos robots et nos applications électroniques. Il s’agit d’un environnement de développement open source basé sur un langage simplifié qui permet en quelques minutes de réaliser des interfaces : en "mode console" (pas d’affichage autre que du texte défilant en bas du logiciel) ou graphiques, allant du tracé de courbe à la 3D OpenGL !
Site officiel de Processing
Dans cet article, on présentera surtout les (…)
Accueil > Mots-clés > Outils logiciels > Processing
Processing
Processing est un environnement de développement simplifié permettant de gérer des animations visuelles 2D et 3D, sonores, des interactions avec le clavier, la souris, la webcam, et même d’utiliser une liaison série.
Cela en fait un outil idéal pour des prototypes rapides de visualisation de valeurs ou d’intéraction avec un robot ou tout autre montage électronique, notamment avec Arduino de par la proximité des concepts.
Et quand vous saurez que c’est totalement compatible avec Java, donc avec des bibliothèques universelles dans plein de domaines connexes (IA, traitement d’image comme OpenCV, interfaces utilisateurs, Bluetooth, ...), vous comprendrez notre enthousiasme.
Articles
-
 Utiliser Processing et ses librairies "hardware"
Utiliser Processing et ses librairies "hardware"
15 mars 2009, par Julien H. -
 Processing sur Raspberry Pi
Processing sur Raspberry Pi
7 juillet 2012, par Julien H.L’environnement de développement d’applet Java appelé Processing (également P5 pour aller plus vite) nous a été souvent de grand secours pour des tests rapides avec Arduino ou pour des applications complètes comme l’interface de contrôle du robot Pobbypède ou le lecteur/enregistreur de chorégraphies de marionnettes.
Maintenant que nos robots sont équipés de cartes sous Linux, comme la Raspberry Pi, ce serait bien de pouvoir bénéficier de la simplicité des codes pour P5 sur cette cible, (…) -
 Générateur de circuit
Générateur de circuit
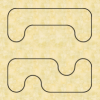
22 février 2009, par Julien H.Cette année, les robots évolueront sur un circuit modulable : il sera composé de tronçons droits et de virages en quart de cercle qui s’assembleront pour former un circuit dont le tracé sera variable, en fonction de la difficulté rencontrée par les participants, et pour donner un peu de suspens dans les phases finales.
Chaque partie du circuit sera peinte sur un carré de 30 x 30 cm en PVC (dalles décoratives pour les sols et les murs). L’ensemble sera constitué de 3 lignes de 6 colonnes (…) -
 Lancer une applet Java sans serveur X
Lancer une applet Java sans serveur X
8 juillet 2012, par Julien H.Écrire des programmes multimédia gérant des images, des bibliothèques de reconnaissance d’images, du réseau, une connexion MIDI ou série, etc. est devenu très facile avec des environnements tels Processing.
Mais il y a un cas particulier qui nécessite une astuce pour faire tourner un programme écrit avec Processing : il s’agit de faire tourner le programme et de bénéficier de toutes les facilités du langage (Java + bibliothèques spéciales) sans avoir d’écran connecté, ce qui veut dire pas (…) -
Arduino pilotée par Processing sur Raspberry Pi
9 juillet 2012, par Julien H.Après avoir réussi à faire tourner quelques programmes sur la RPi, il était tant de l’utiliser pour contrôler un robot. C’est chose faite avec la première liaison Raspberry Pi / Arduino, utilisant Processing (Java) et Firmata (C++).
-
 Visualisation radar d’une détection de distance
Visualisation radar d’une détection de distance
15 septembre 2008, par Julien H.Le radar suivant est réalisé avec Processing. ll reprend le principe de l’oscilloscope minimal : notre capteur (carte électronique) envoie la valeur lue par liaison série jusqu’à l’ordinateur qui transforme la valeur pour la représenter dans un radar (demi-cercle).
On pourra ainsi représenter la détection de l’environnement ambiant avec un capteur de distance Sharp ou ultrason sur un servomoteur en rotation permanente.
Le résultat
This browser does not have a Java Plug-in. (…) -
 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)
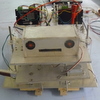
19 janvier 2011, par Sébastien CornerUn robot mobile autonome conçu et réalisé dans le cadre de mes études en robotique.
Le matériel utilisé est le suivant : moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17. roues de roller, poulies et courroies crantées drivers de moteurs M325 de Soprolec carte électronique programmable Arduino Duemilanove caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology mécanique en aluminium et plexiglas, architecturé par des tiges filetées batteries Lithium (…) -
 Gyroscope Wii Motion Plus
Gyroscope Wii Motion Plus
1er août 2009, par Julien H.On va essayer d’utiliser un gyroscope. Pour se simplifier la vie, on va prendre le gyroscope contenu dans le Wii Motion Plus, un plug-in pour la manette Wiimote de la console de jeux Wii de Nintendo.
Il s’agit en fait de deux circuits : un gyroscope à 2 axes, IDG-600 de InvenSense pour les angles de tangage et de roulis (pitch and roll), et un gyroscope à 1 axe de X3500W de Epson Toyocom pour l’angle de lacet (yaw).
Voici déjà un aperçu de quoi on va parler ici : des chiffres, des (…) -
 Représenter les couleurs par un son
Représenter les couleurs par un son
1er novembre 2013, par Jean B.Après avoir utilisé une abaque de teinte pour visualiser la couleur détectée par notre capteur à filtres rouge, vert, bleu, on cherche à rendre audible cette combinaison de couleurs primaires pour laisser à notre cerveau la possibilité d’entendre une teinte.
-
 Contrôle de Nono avec Firmata
Contrôle de Nono avec Firmata
8 juillet 2012, par Julien H.Notre robot Nono est équipé d’une carte Arduino à micro-contrôleur AVR. Ses capacités de communication sont les bus I2C et SPI et la liaison série UART.
Cette dernière est connectée en USB. Sur les dernières versions, la puce d’adaptation entre le µC AVR et le port USB est reprogrammable : par défaut, c’est une liaison série qui est prévue, permettant ainsi une programmation via un bootloader, mais il est également possible d’activer un mode USB différent, comme l’HID ou le MIDI. (…)
